3.1.8.3.11.4.2 Configuring the position window (CSP)
Note
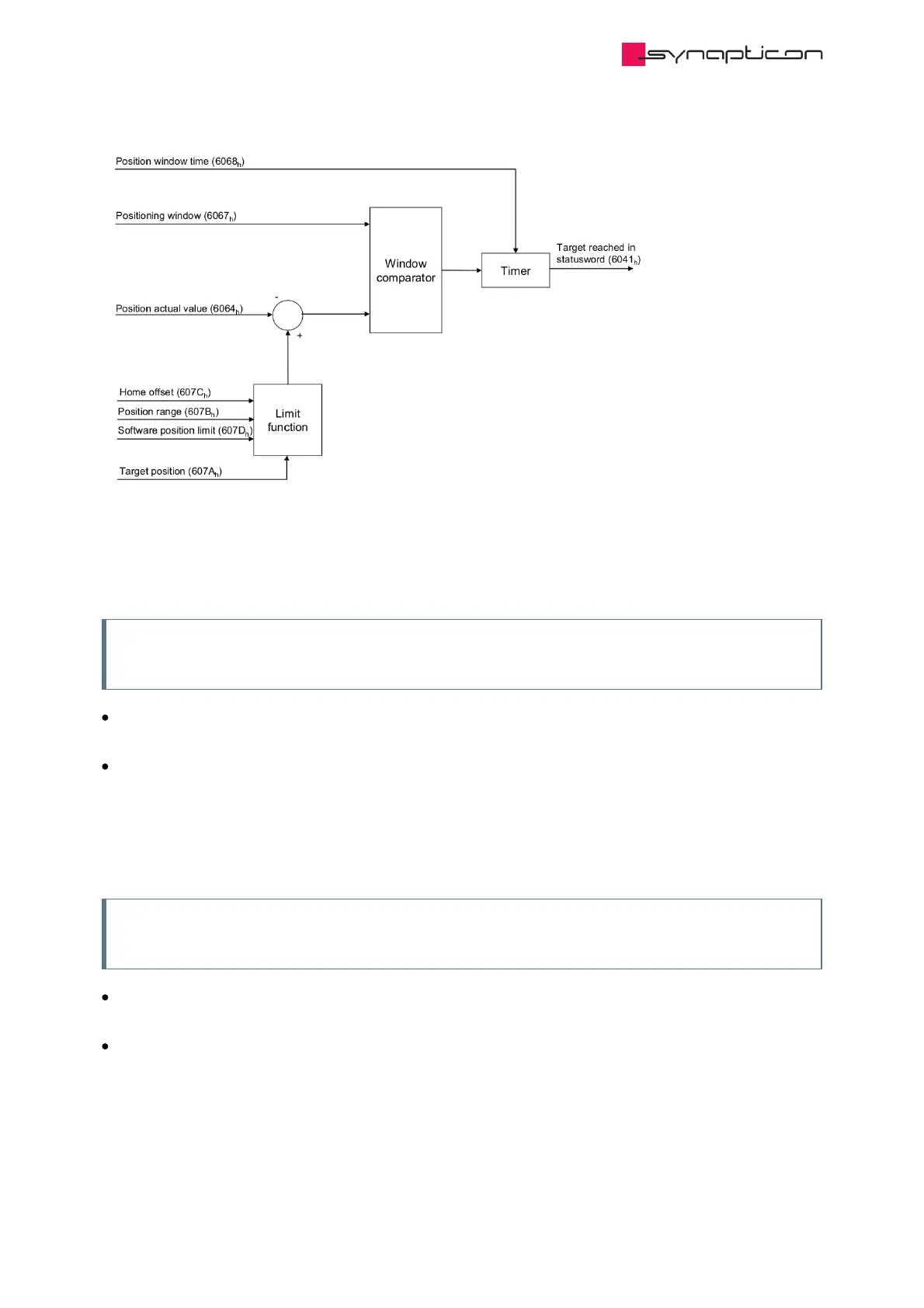
The accepted position range is calculated as two times the position window.
Enter the position window value in object 0x6067 Position window (unit is given in increments of the
position encoder). The value 0xFFFFFFFF switches the feature off (default).
In object 0x6068 Position window time you can configure the time required for the position sensor to
remain within the position window before it’s considered to be inside the window. The unit is given in ms.
3.1.8.3.11.4.3 Configuring the velocity window (CSV)
Note
The accepted velocity range is calculated as two times the velocity window.
Enter the velocity window value in object 0x606D Velocity window (unit is given in rpm) The value 0xFFFF
switches the feature off (default).
In object 0x606E Velocity window time you can configure the time required for the value to remain within
the velocity window before it’s considered to be inside the window. The unit is given in ms.
 Loading...
Loading...

