12.5 Installation → Load/Save
Auto
Hold down the Auto button to move the robot arm as shown in the animation. Note:
Release the button to stop the motion at any time!
Manual
Pushing the Manual button will take you to the MoveTab where the robot arm can
be moved manually. This is only needed if the movement in the animation is not
preferable.
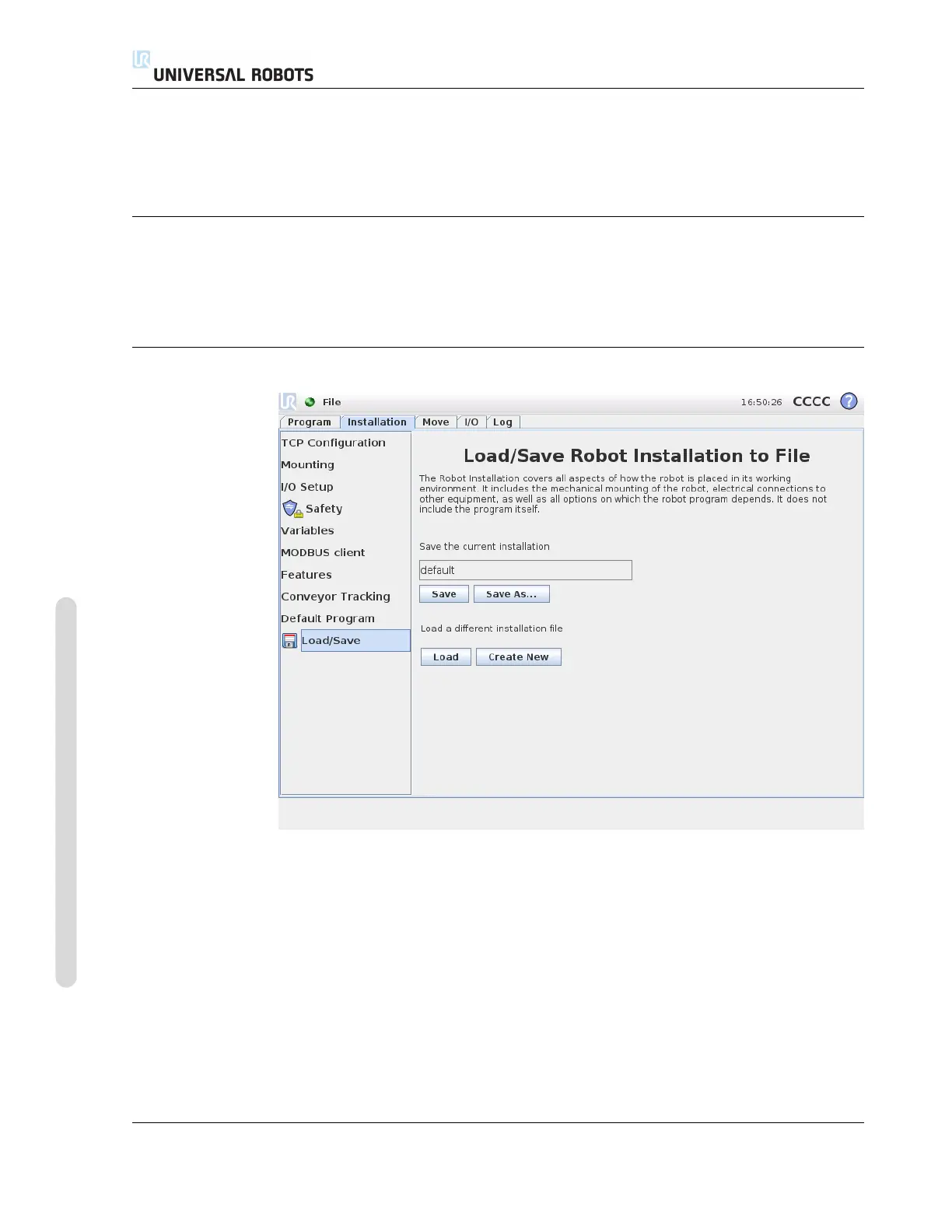
12.5 Installation → Load/Save
The Robot Installation covers all aspects of how the robot arm and control box are
placed in the working environment. It includes the mechanical mounting of the robot
arm, electrical connections to other equipment, as well as all options on which the
robot program depends. It does not include the program itself.
These settings can be set using the various screens under the Installation tab,
except for the I/O domains which are set in the I/O tab (see 12.2).
It is possible to have more than one installation file for the robot. Programs created will
use the active installation, and will load this installation automatically when used.
Any changes to an installation need to be saved to be preserved after power down. If
there are unsaved changes in the installation, a floppy disk icon is shown next to the
CB3 II-22 Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.