13.10 Command: Set
13.10 Command: Set
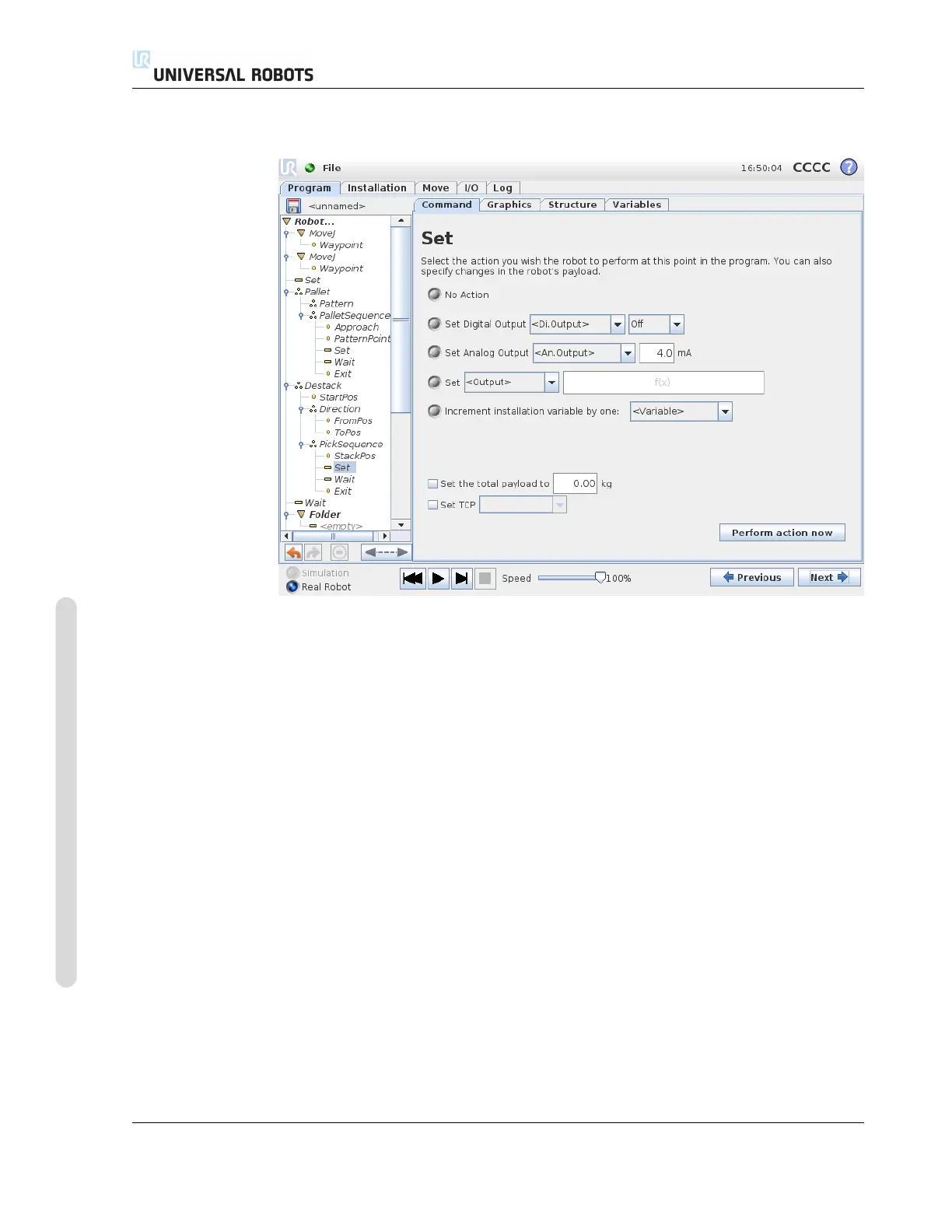
Sets either digital or analog outputs to a given value.
Can also be used to set the payload of the robot arm, for example the weight that is
picked up as a consequence of this action. Adjusting the weight can be neccesary to
prevent the robot from triggering a protective stop unexpectedly, when the weight at
the tool is different from the expected one.
The active TCP can also be modified using a Set command. Simply tick the check box
and select one of the TCP offsets from the menu. If the active TCP for a particular mo-
tion is known at the time of writing of the program, consider using the TCP selection
on the Move card instead (see 13.5). For further information about configuring named
TCPs, see 12.6.
CB3 II-58 Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.