5.1 Limiting Safety-related Functions
750 mm
200 mm
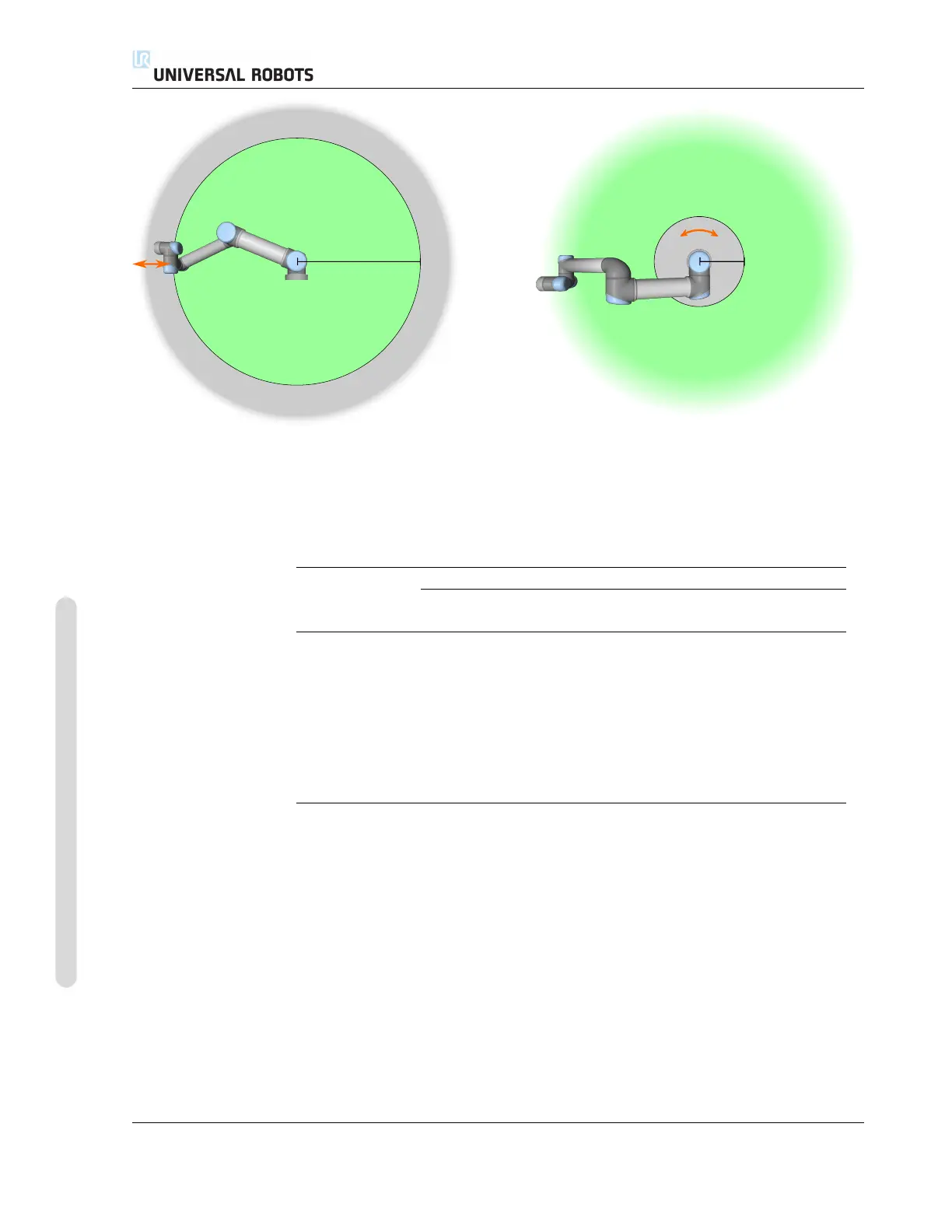
Figure 5.1: Certain areas of the workspace should receive attention regarding pinching hazards, due to the
physical properties of the robot arm. One area is defined for radial motions, when the wrist 1 joint is at a
distance of at least 750 mm from the base of the robot. The other area is within 200 mm of the base of the
robot, when moving in the tangential direction.
Worst Case
Limiting Safety
Function
Trueness Detection
Time
De-energizing
Time
Reaction Time
Joint position 1.15
◦
100 ms 1000 ms 1100 ms
Joint speed 1.15
◦
/s 250 ms 1000 ms 1250 ms
TCP position 20 mm 100 ms 1000 ms 1100 ms
TCP orientation 1.15
◦
100 ms 1000 ms 1100 ms
TCP speed 50
mm
/s 250 ms 1000 ms 1250 ms
TCP force 25 N 250 ms 1000 ms 1250 ms
Momentum 3
kg m
/s 250 ms 1000 ms 1250 ms
Power 10 W 250 ms 1000 ms 1250 ms
The system is considered de-energized when the 48 V bus voltage reaches an electrical
potential below 7.3 V. The de-energizing time is the time from a detection of an event
until the system has been de-energized.
UR5/CB3 I-40 Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.