13.24 Command: Pallet
• Non-compliant: The limit is the maximum deviation from the program trajectory
which is allowed before the robot protective stops. Units are [mm] and [deg].
Test force settings
The on/off button, labeled “Test”, toggles the behavior of the Freedrive button on the
back of the Teach Pendant from normal Freedrive mode to testing the force command.
When the Test button is on and the Freedrive button on the back of the Teach Pen-
dant is pressed, the robot will perform as if the program had reached this force com-
mand, and this way the settings can be verified before actually running the complete
program. Especially, this possibility is useful for verifying that compliant axes and
forces have been selected correctly. Simply hold the robot TCP using one hand and
press the Freedrive button with the other, and notice in which directions the robot
arm can/cannot be moved. Upon leaving this screen, the Test button automatically
switches off, which means the Freedrive button on the back of the Teach Pendant is
again used for regular Freedrive mode. Note: The Freedrive button will only be effec-
tual when a valid feature has been selected for the Force command.
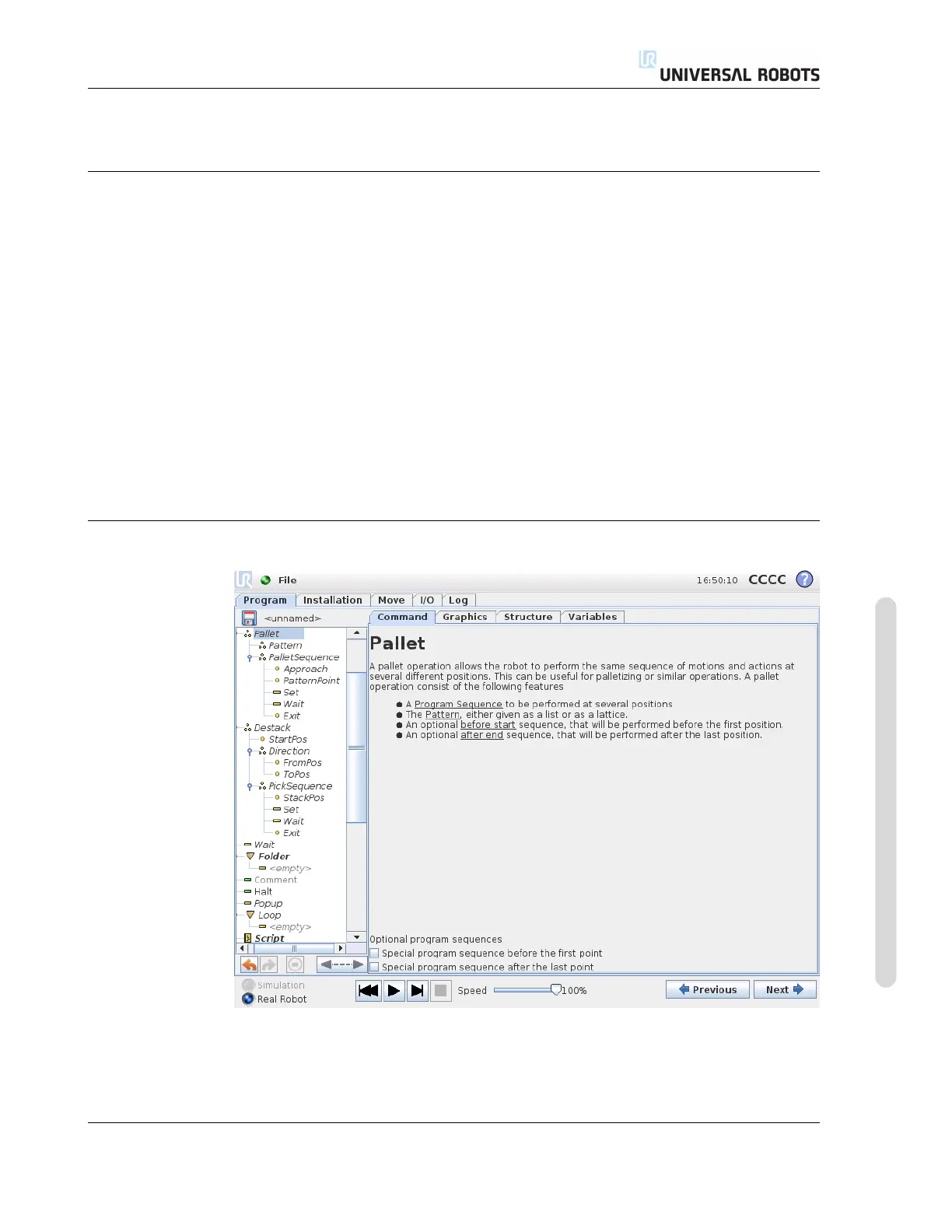
13.24 Command: Pallet
A pallet operation can perform a sequence of motions in a set of places given as a
pattern, as described in 13.22. At each of the positions in the pattern, the sequence of
motions will be run relative to the pattern position.
Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.
II-75 CB3