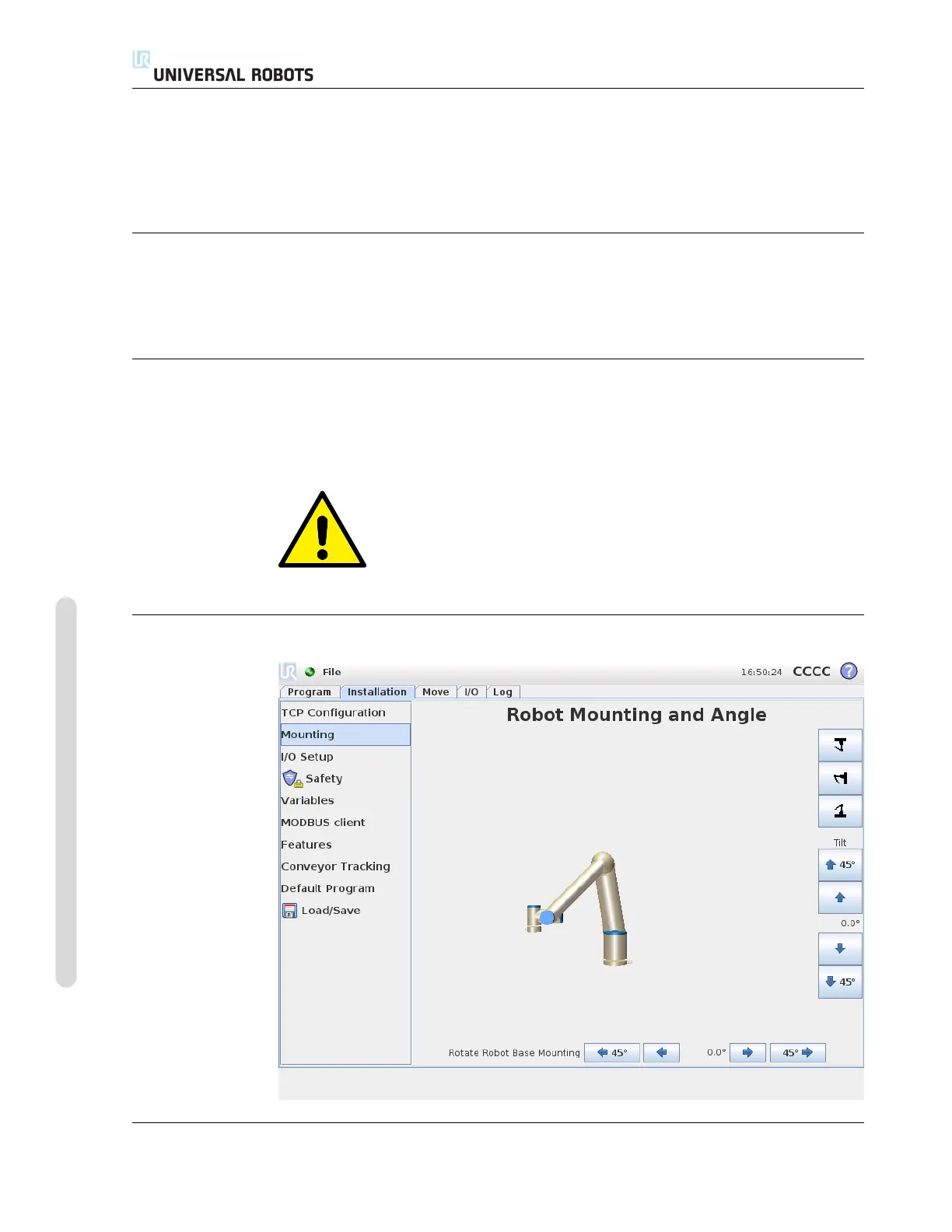
12.7 Installation → Mounting
3. Use the button below to move to a position in which the orientation of the tool
corresponding to the TCP coincides with the coordinate system of the selected
feature.
4. Verify the calculated TCP orientation and set it onto the selected TCP using the
Set button.
12.6.5 Payload
The weight of the tool of the robot is specified in the lower part of the screen. To
change this setting, simply tap the white text field and enter a new weight. The setting
applies to all defined TCPs.
12.6.6 Center of gravity
The center of gravity of the tool may optionally be specified using the fields CX, CY
and CZ. The tool center point is assumed to be the tool’s center of gravity if nothing
else has been specified. The setting applies to all defined TCPs.
WARNING:
Make sure to use the correct installation settings. Save and load the
installation files along with the program.
12.7 Installation → Mounting
CB3 II-26 Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.