13.28 Graphics Tab
13.26 Command: Start/Stop Conveyor Tracking
When using a conveyor, the robot can be configured to track the movement of the con-
veyor. Two program nodes are available for tracking a conveyor, Start Conveyor
Tracking and Stop Conveyor Tracking. When the Conveyor Tracking defined
in the installation is configured correctly, a linear or circular conveyor can be tracked.
The nodes can be added from the Wizard Program nodes under the Structure tab.
When the program is executing between a Start Conveyor Tracking and a Stop
Conveyor Tracking node, the robot adjusts it’s movements to follow the conveyor.
13.27 Command: Suppress
Suppressed program lines are simply skipped when the program is run. A suppressed
line can be unsuppressed again at a later time. This is a quick way to make changes to
a program without destroying the original contents.
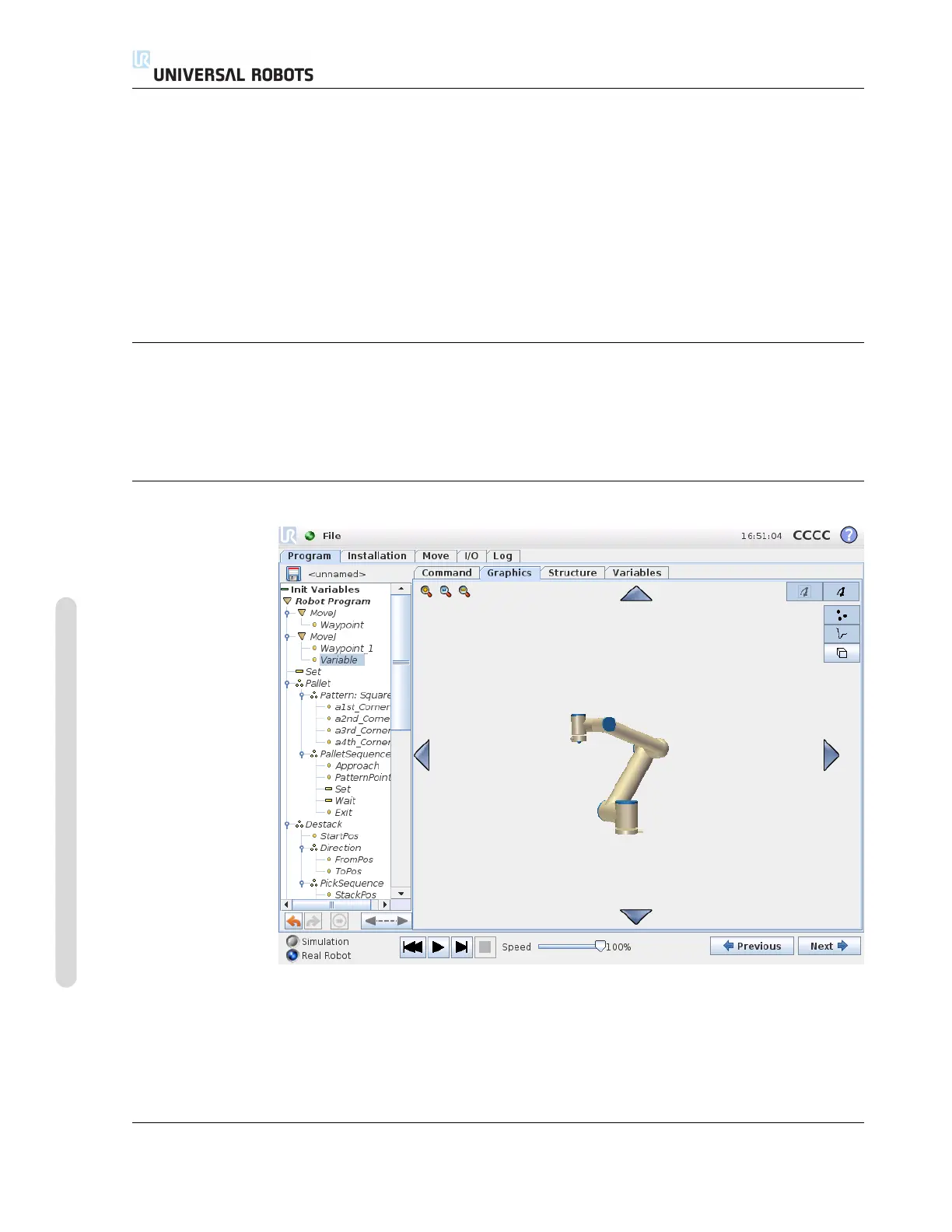
13.28 Graphics Tab
Graphical representation of the current robot program. The path of the TCP is shown
in the 3D view, with motion segments in black, and blend segments (transitions be-
tween motion segments) shown in green. The green dots specify the positions of the
TCP at each of the waypoints in the program. The 3D drawing of the robot arm shows
CB3 II-80 Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.