13.25 Command: Seek
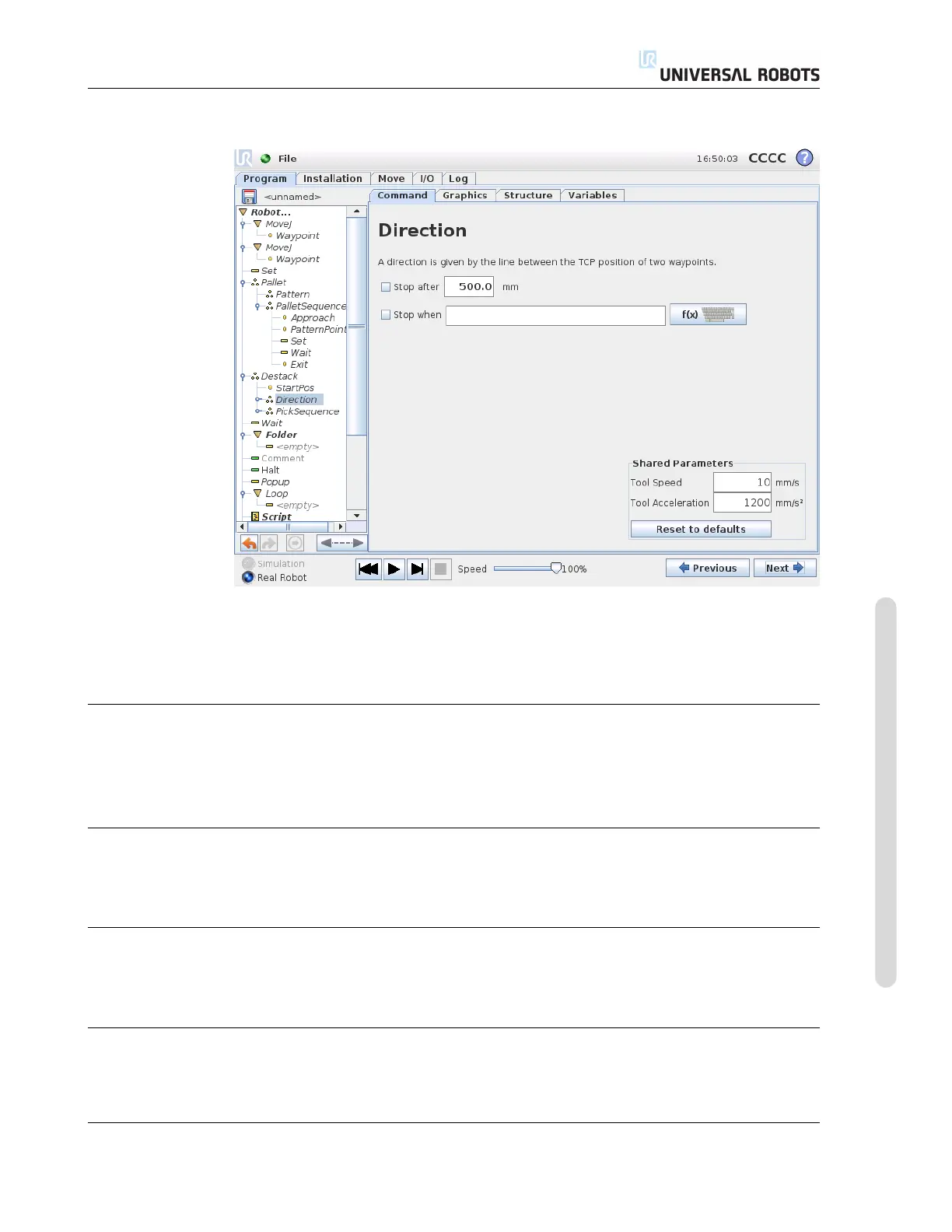
Direction
The direction is given by two positions, and is calculated as the position difference
from the first positions TCP to the second positions TCP. Note: A direction does not
consider the orientations of the points.
Next Stacking Position Expression
The robot arm moves along the direction vector while continuously evaluating whether
the next stack position has been reached. When the expression is evaluated to True
the special sequence is executed.
“BeforeStart”
The optional BeforeStart sequence is run just before the operation starts. This can
be used to wait for ready signals.
“AfterEnd”
The optional AfterEnd sequence is run when the operation is finished. This can be
used to signal conveyor motion to start, preparing for the next stack.
Pick/Place Sequence
Like for the Pallet operation (13.24), a special program sequence is performed at each
stack position.
Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.
II-79 CB3