12.11 Installation → MODBUS client I/O Setup
It is possible to change the value of an installation variable by highlighting the variable
in the list and then clicking on Edit Value.
To delete a variable, select it in the list, then click Delete.
After configuring the installation variables, the installation itself must be saved to keep
this configuration, see 12.5. The installation variables and their values are also saved
automatically every 10 minutes.
If a program or an installation is loaded and one or more of the program variables have
the same name as the installation variables, the user is presented with two options to
resolve the issue: either use the installation variables of the same name instead of the
program variable or have the conflicting variables renamed automatically.
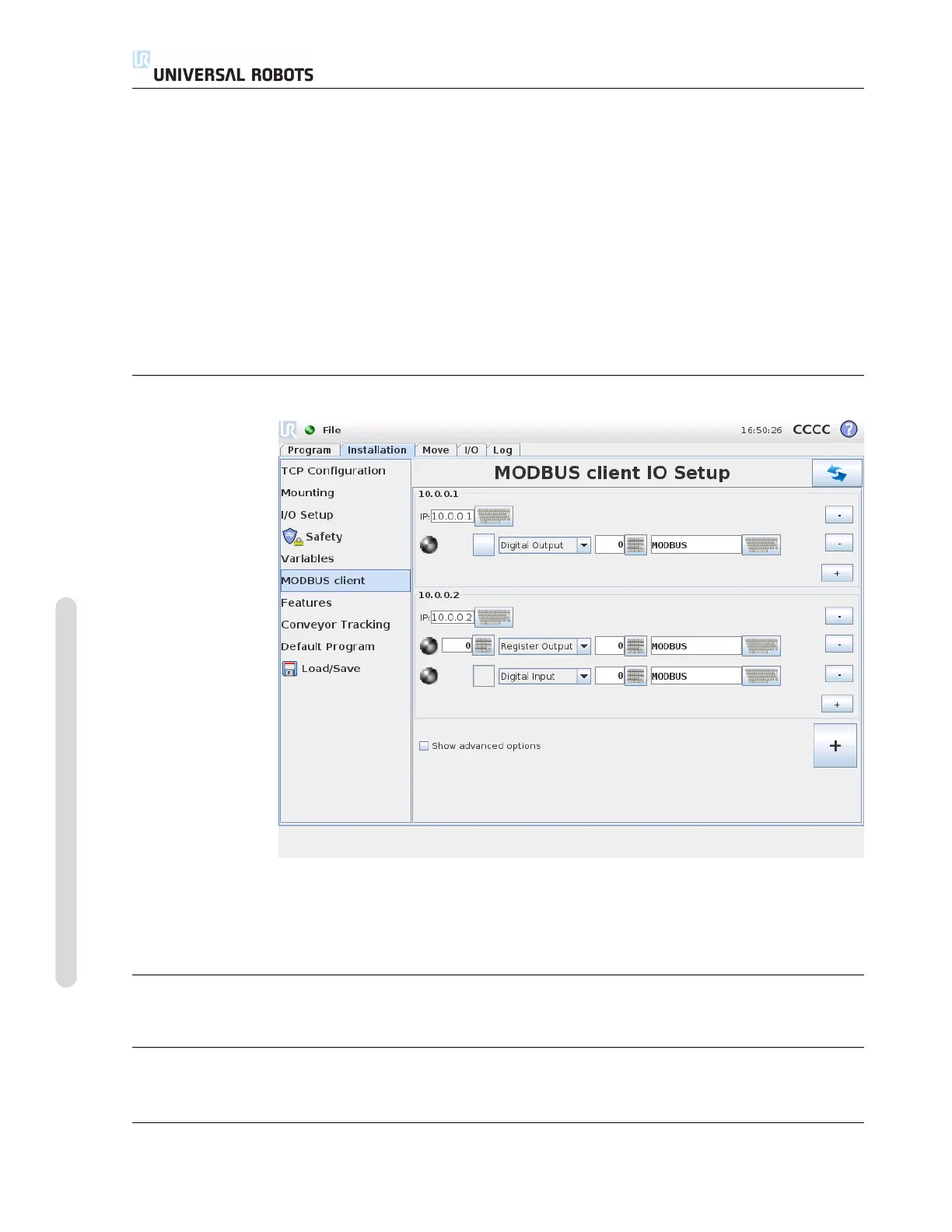
12.11 Installation → MODBUS client I/O Setup
Here, the MODBUS client (master) signals can be set up. Connections to MODBUS
servers (or slaves) on specified IP addresses can be created with input/output signals
(registers or digital). Each signal has a unique name so it can be used in programs.
Refresh
Push this button to refresh all MODBUS connections.
Add unit
Push this button to add a new MODBUS unit.
CB3 II-30 Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.