13.5 Command: Move
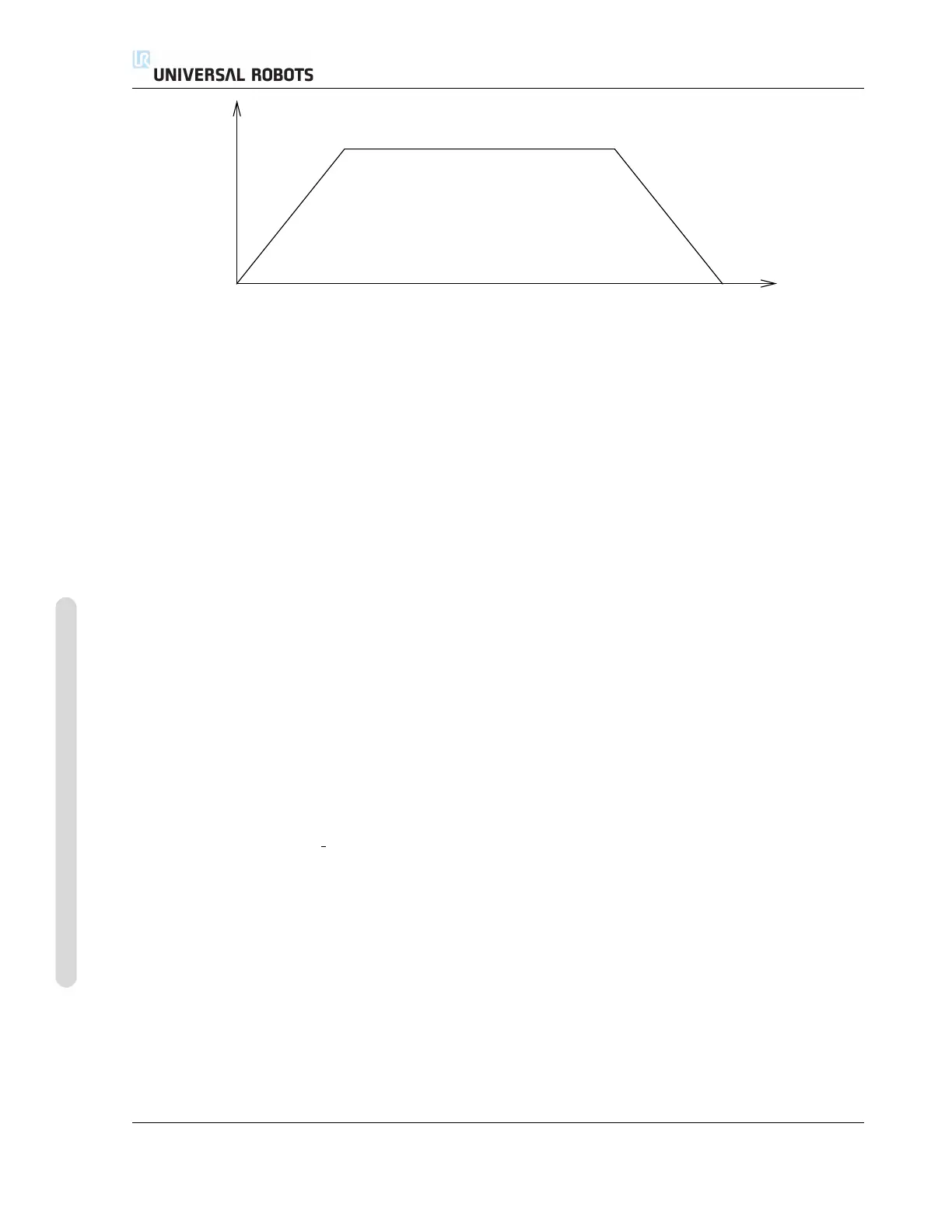
Time
Speed
Acceleration
Cruise
Deceleration
Figure 13.1: Speed profile for a motion. The curve is divided into three segments: acceleration, cruise and
deceleration. The level of the cruise phase is given by the speed setting of the motion, while the steepness of
the acceleration and deceleration phases is given by the acceleration parameter.
Feature selection
For MoveL and MoveP, it is possible to select which feature space the waypoints under
the Move command should be represented when specifying these waypoints. This
means that when setting a waypoint, the program will remember the tool coordinates
in the feature space of the selected feature. There are a few circumstances that need
detailed explanation:
Relative waypoints: The selected feature has no effect on relative waypoints. The rela-
tive movement is always performed w.r.t. to orientation of the Base.
Variable waypoints: When the robot arm moves to a variable waypoint, the tool target
position is calculated as the coordinates of the variable in the space of the selected
feature. Therefore, the robot arm movement for a variable waypoint changes if
another feature is selected.
Variable feature: If any of the features in the currently loaded installation are selected
as variable, these corresponding variables are also selectable in the feature selec-
tion menu. If a feature variable (named with the name of the feature suffixed by
“ var”) is selected, robot arm movements (except to Relative waypoints) are rela-
tive to the actual value of the variable when the program is running. The initial
value of a feature variable is the value of the actual feature as configured in the
installation. If this value is modified, then the movements of the robot change.
CB3 II-52 Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.