13.25 Command: Seek
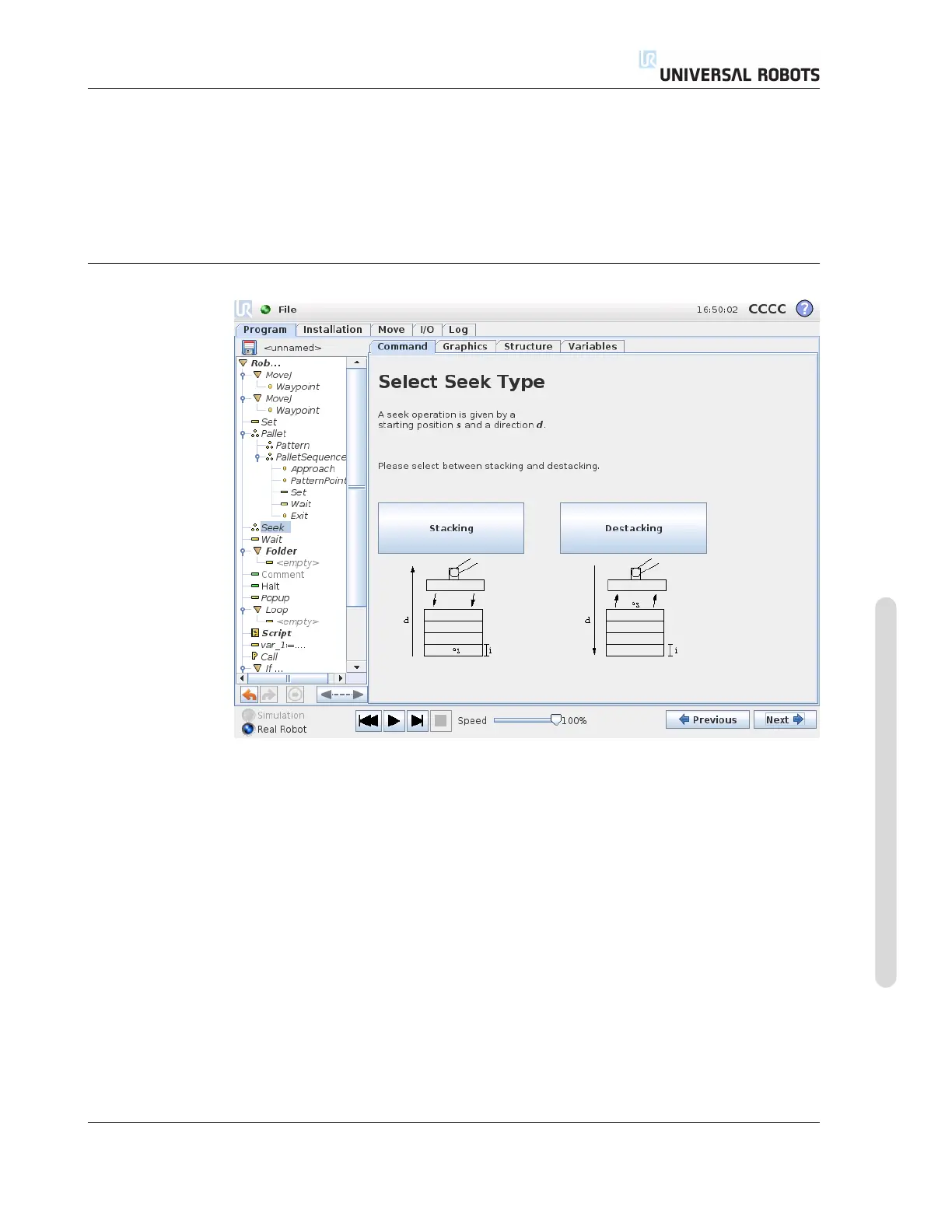
When programming a seek operation for working on a stack, one must define s the
starting point, d the stack direction and i the thickness of the items in the stack.
On top of this, one must define the condition for when the next stack position is
reached, and a special program sequence that will be performed at each of the stack
positions. Also speed and accelerations need to be given for the movement involved
in the stack operation.
Stacking
When stacking, the robot arm moves to the starting position, and then moves opposite
the direction to search for the next stack position. When found, the robot remembers
the position and performs the special sequence. The next time round, the robot starts
the search from the remembered position incremented by the item thickness along the
direction. The stacking is finished when the stack hight is more than some defined
number, or when a sensor gives a signal.
Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.
II-77 CB3