15.9 General Limits
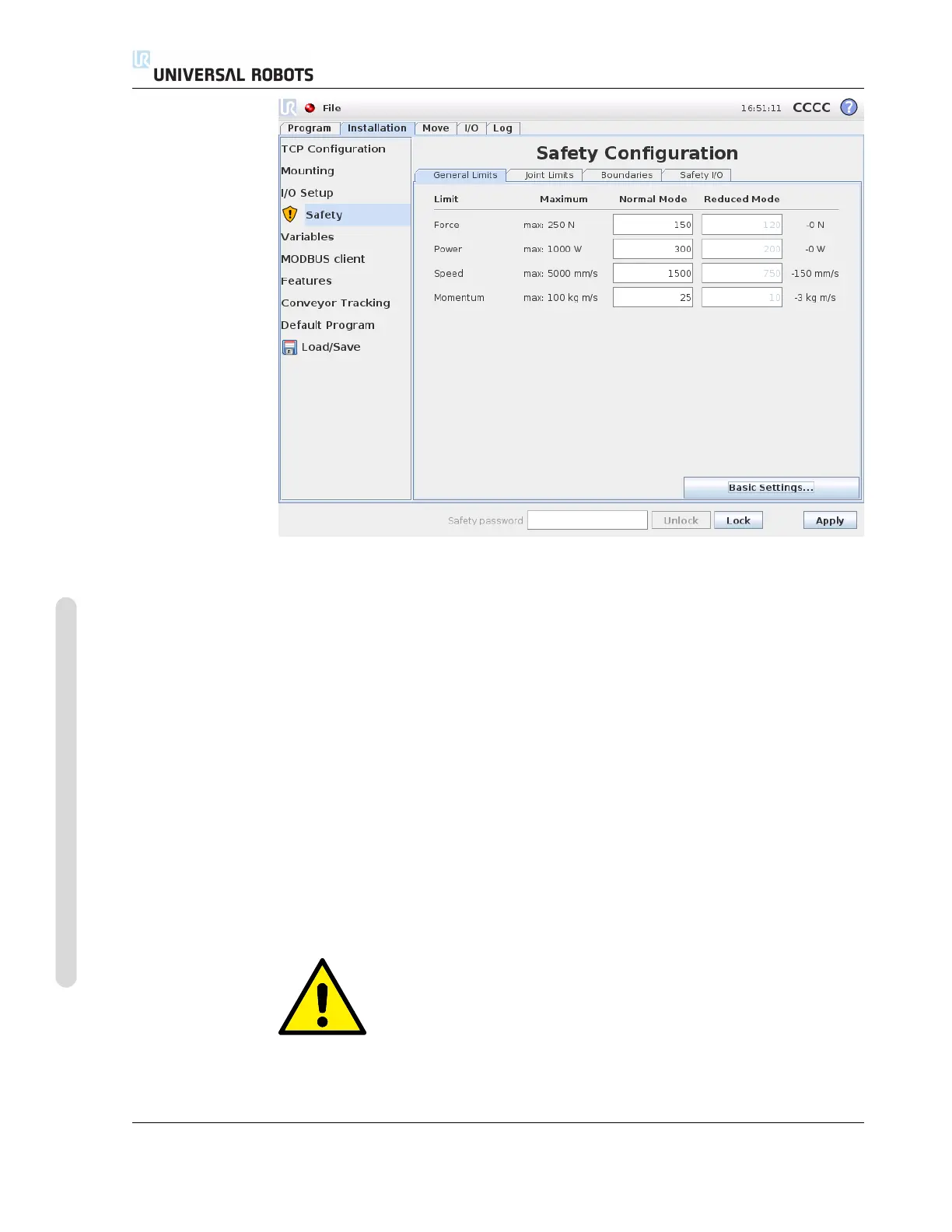
Here, each of the general limits, described in 15.9, can be modified independently of
the others. This is done by tapping the corresponding text field and entering the new
value. The highest accepted value for each of the limits is listed in the column titled
Maximum. The force limit can be set to a value between 100 N and 250 N, and the
power limit can be set to a value between 80 W and 1000 W.
Note that the fields for limits in Reduced mode are disabled when neither a safety plane
nor a configurable input is set to trigger it (see 15.11 and 15.12 for more details). Fur-
thermore, the Speed and Momentum limits in Reduced mode must not be higher than
their Normal mode counterparts.
The tolerance and unit for each limit are listed at the end of the row that corresponds
to it. When a program is running, the speed of the robot arm is automatically adjusted
in order to not exceed any of the entered values minus the tolerance (see 15.3). Note
that the minus sign displayed with the tolerance value is only there to indicate that
the tolerance is subtracted from the actual entered value. The safety system performs
a category 0 stop, should the robot arm exceed the limit (without tolerance).
WARNING:
The speed limit is imposed only on the robot TCP, so other parts of
the robot arm may move faster than the defined value.
CB3 II-100 Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.