8-52
8
ROBOT LANGUAGE
8-5 Sample Programs
8-5-16
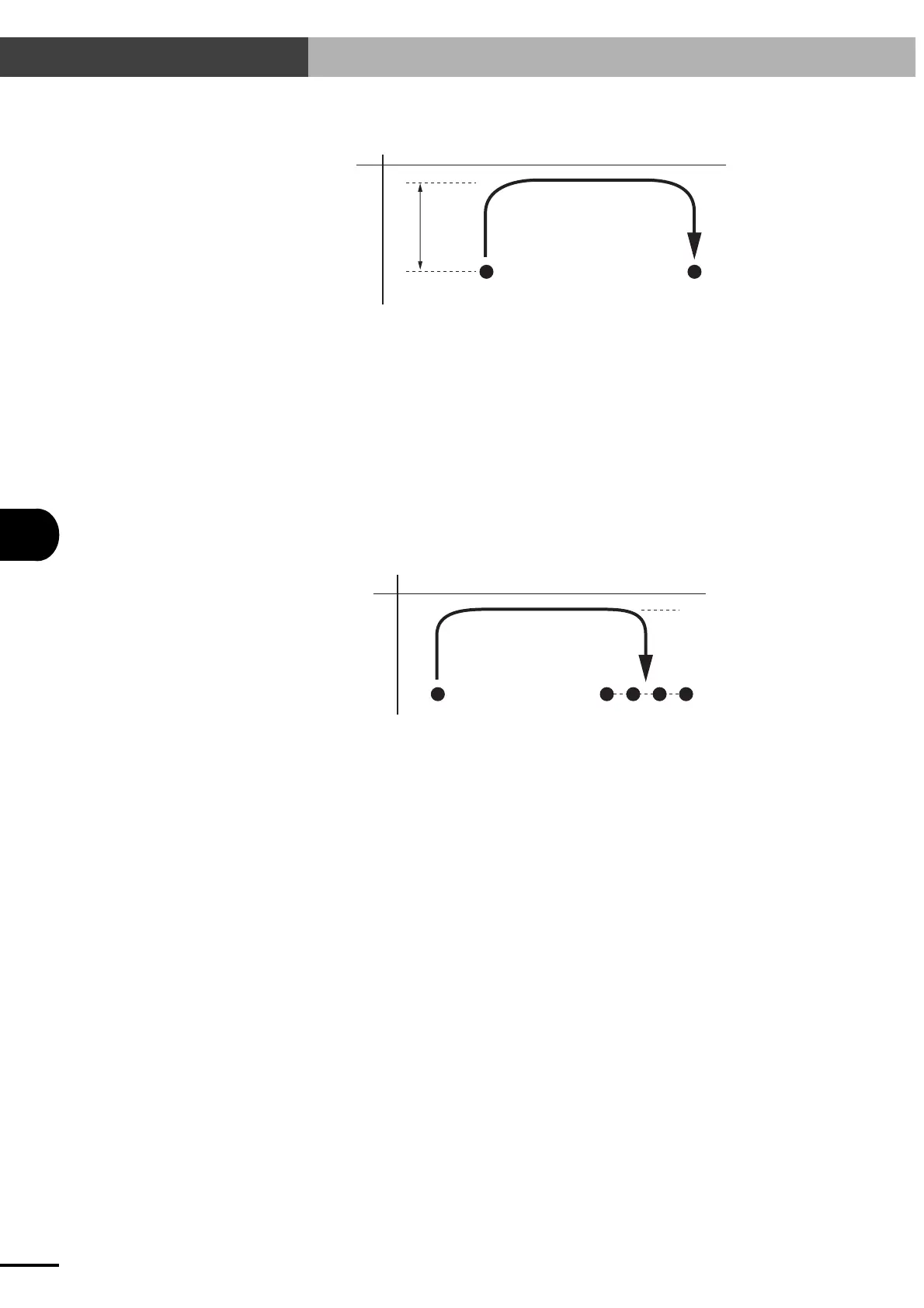
Picking up a workpiece at P0 and placing it at P1
Y
X
P0
P1
50mm
Program Comment
[NO0]
001:MOVA 0, 100 ; Moves to P0
002:CALL 1, 1 ; PICK routine call
003:ACHI 2, -50
; Specifies arch motion to move back Y-axis by -50mm
004:MOVA 1, 100 ; Moves to P1 (arch motion)
005:CALL 2, 1 ; PLACE routine call
8-5-17
Picking up workpieces at P0 and placing them sequentially
at P1, P2, P3 and P4
X
P0
P1 to P4
Y=10mm
Y
Program Comment
[NO0]
001:P 1 ; Set point variable to 1
002:CALL 1, 4 ; Calls routine NO1 four times
[NO1]
001:ACHA 2, 10
; Specifies arch motion to move back Y-axis by Y=10mm
002:MOVA 0, 100 ; Moves to P0 (arch motion)
003:CALL 2, 1 ; PICK routine call
004:ACHA 2, 10
;
Specifies arch motion to move back Y-axis by Y=10mm
005:MOVA P, 100 ; Moves to P1-P4 (arch motion)
006:CALL 3, 1 ; PLACE routine call
007:P+ ; Point variable increment
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
 Loading...
Loading...









