8-55
8
ROBOT LANGUAGE
8-5 Sample Programs
8-5-20
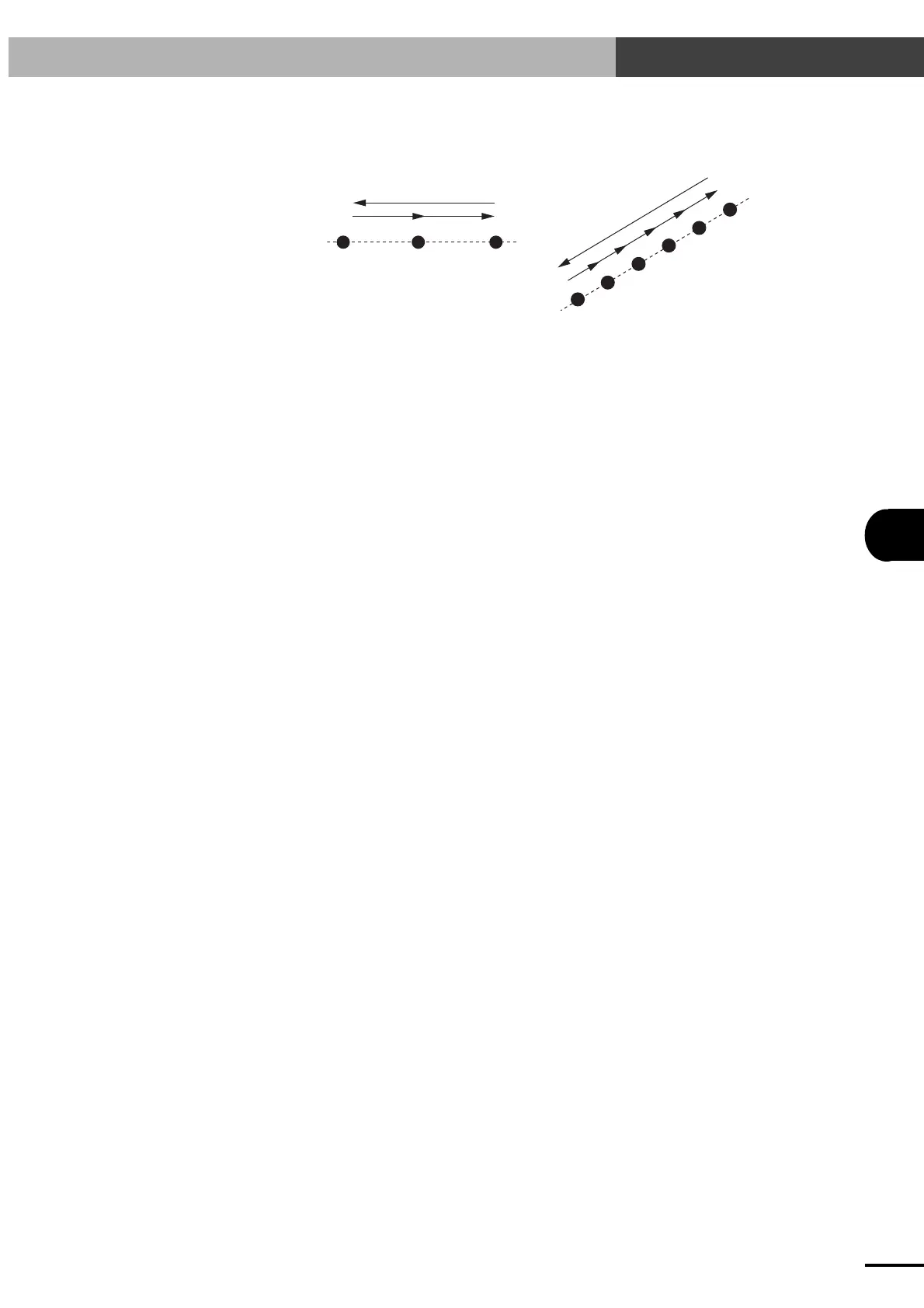
Multi-robot operation
Two single-axis robots are used to perform multi-task operation in asynchronous mode.
X-axis Y-axis
P0 P1 P2
P10
P11
P12
P13
P14
P15
■ Teaching each point of P0 to P2 and P10 to P15 should be completed beforehand in
PNT (point) mode. (Y-axis data at P0 to P2 and X-axis data at P10 to P15 can be any
value since they are not used.)
Program Comment
[NO0] <<Task 0>>
001: TON 1, 2, 0 ; Starts program NO2 as task 1
002: L 0 ; Label definition
003: P 0 ; Sets point variable to 0
004: CALL 1, 3 ; Calls subroutine NO1 three times
005: JMP 0, 0 ; Returns to L0
[NO1]
001: DRVA 1, P, 100 ; X-axis robot moves to P0-P2
002: P+ ; Point variable increment
[NO2] <<Task 1>>
001: L 0 ; Label definition
002: P 10 ; Sets point variable to 10
003: CALL 3, 6 ; Calls subroutine NO3 six times
004: JMP 0, 2 ; Returns to L0
[NO3]
001: DRVA 2, P, 100 ; Y-axis robot moves to P10-P15
002: P+ ; Point variable increment
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
 Loading...
Loading...









