4
Motion Parameters
4.3.2
Motion Setting Parameter Details
4-44
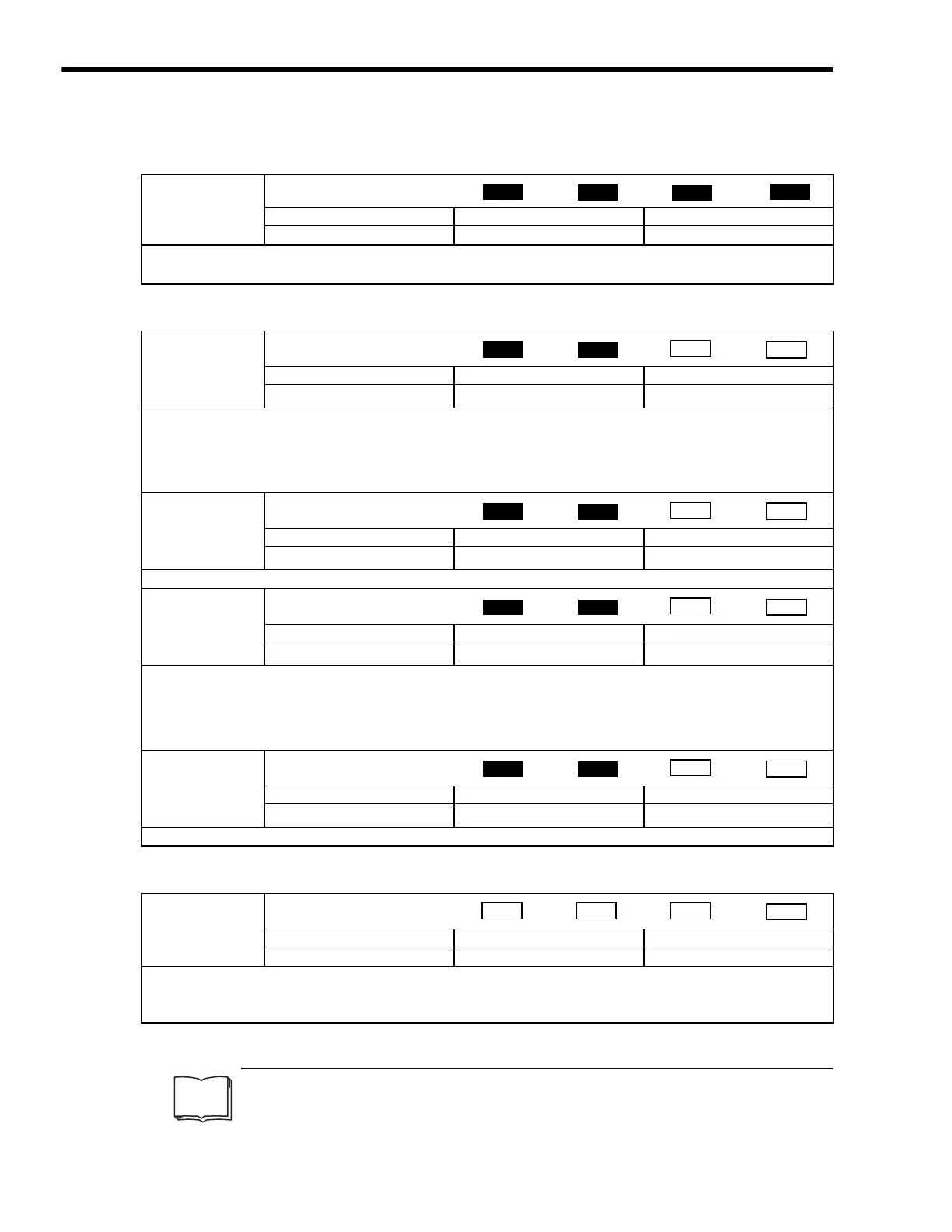
( 31 ) Supplemental Settings
( 32 ) Absolute Infinite Length Axis Position Control Information
( 33 ) Transparent Command Mode
1
Store:
The use of "store" here refers to information that is automatically transferred by the CPU system
without any action by the user. This term is mainly used with this meaning when explaining motion
monitoring parameters.
OW
5C
Fixed Parameter Number
Setting Range Setting Unit Default Value
0 to 65535 − 0
Set the number of the fixed parameter to read with the FIXPRM_RD motion subcommand.
The results of reading the fixed parameter will be stored
1
in the Fixed Parameter Monitor (monitoring parameter IL
56).
Position
Phase
Speed
Torque
OL
5E
Absolute Position at Power
OFF (Low Value)
Setting Range Setting Unit Default Value
−
2
31
to 2
31
−
1
pulse 0
This information is for infinite length axis position control when an absolute encoder is used.
The encoder position is stored in 4 words.
If the Infinite Length Axis Position Information LOAD bit is set to 1 in the RUN Commands (setting parameter OW
00, bit
7), the position information will be recalculated with the values set here and the Modularized Position at Power OFF (OL
62
and OL
64).
OL
60
Absolute Position at Power
OFF (High Value)
Setting Range Setting Unit Default Value
−
2
31
to 2
31
−
1
pulse 0
Same as for OL
5E.
OL
62
Modularized Position at Power
OFF (Low Value)
Setting Range Setting Unit Default Value
−
2
31
to 2
31
−
1
pulse 0
This information is for infinite length axis position control when an absolute encoder is used.
The axis position in pulses managed internally by the controller is stored in 4 words.
If the Infinite Length Axis Position Information LOAD bit is set to ON in the RUN Commands (setting parameter OW
00, bit
7), the position information will be recalculated with the values set here and the Absolute Position at Power OFF (OL
5E and
OL
60).
OL
64
Modularized Position at Power
OFF (High Value)
Setting Range Setting Unit Default Value
−
2
31
to 2
31
−
1
pulse 0
Same as for OL
62.
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
OW
70 to
OW
7E
Command Buffer for
Transparent Command Mode
Setting Range Setting Unit Default Value
−−0
This area is used for command data when MECHATROLINK servo commands are specified directly.
• MECHATROLINK-I and MECHATROLINK-II, 17-byte Mode: Data area = OW
70 to OW
77
• MECHATROLINK-II, 32-byte Mode: Data area = OW
70 to OW
7E
Position
Phase
Speed
Torque
TERMS
WWW.NNC.IR