4.4
SVA-01 Module Parameter Details
4-75
( 12 ) Secondary Speed Compensation
( 13 ) Speed Override
( 14 ) General-purpose Analog Output (AO)
OL
16
Secondary Speed
Compensation
Setting Range Setting Unit Default Value
−
2
31
to 2
31
−
1
Same as the Speed Units 0
Set the speed feed forward amount for the Phase Reference command (PHASE).
The setting unit for Speed Amends (setting parameter OW
31) is 0.01% (fixed). The units for this parameter can be selected
by the user.
When used at the same time as OW
31, speed compensation can be performed twice.
Position
Phase
Speed
Torque
OW
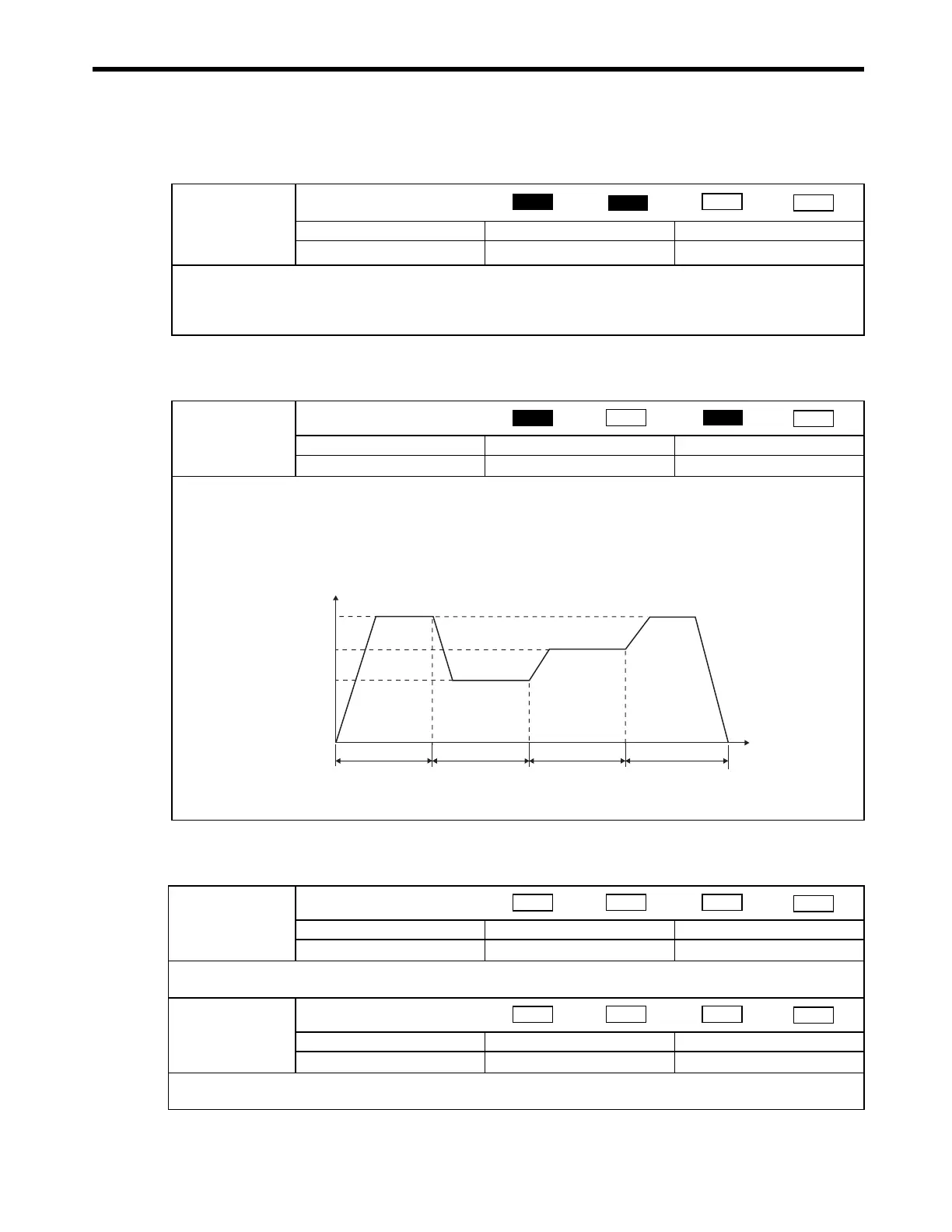
18
Speed Override
Setting Range Setting Unit Default Value
0 to 32767 0.01% 10000
Set the percentage of the Speed Reference (OL
10) to output in units of 0.01%.
The override value is always enabled. Set to 10000 (fixed) when not using the speed override function.
Speed reference (OL
10)
×
Speed override (OL
18) = Output speed
This parameter can be changed at any time during speed reference operation, and the machine will be accelerated or decelerated
immediately according to the set value.
When the speed override is set to 0, the output speed is 0 and the motor will not operate.
Position
Phase
Speed
Torque
Speed
Override set value
10,000
100%
75%
50%
10,0007,5005,000
OL
1A
General-purpose AO1
Setting Range Setting Unit Default Value
−
10000 to 10000
0.001 V 0
This parameter can be used only in General-purpose I/O Mode.
The analog data set in OL
1A is output.
OL
1B
General-purpose AO2
Setting Range Setting Unit Default Value
−
10000 to 10000
0.001 V 0
This parameter can be used only in General-purpose I/O Mode.
The analog data set in OL
1B is output.
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
WWW.NNC.IR