Parameters 241
DI3 Digital input DI3 (10.02 DI delayed status, bit 2). 4
DI4 Digital input DI4 (10.02 DI delayed status, bit 3). 5
DI5 Digital input DI5 (10.02 DI delayed status, bit 4). 6
Supervision 1 Bit 0 of 32.01 Supervision status 21
Supervision 2 Bit 1 of 32.01 Supervision status 22
Supervision 3 Bit 2 of 32.01 Supervision status.23
Other [bit] Source selection (see Terms and abbreviations). -
40.31 Set 1 deviation
inversion
Inverts the input of the process PID controller.
0 = Deviation not inverted (Deviation = Setpoint -
Feedback)
1 = Deviation inverted (Deviation = Feedback - Setpoint)
See also section Sleep and boost functions for process
PID control (page 71).
Not inverted
(Ref - Fbk)
Not inverted
(Ref - Fbk)
0. 0
Inverted (Fbk - Ref) 1. 1
Other [bit] Source selection (see Terms and abbreviations). -
40.32 Set 1 gain Defines the gain for the process PID controller. See
parameter 40.33 Set 1 integration time.
1.00
0.01…100.00 Gain for PID controller. 100 = 1
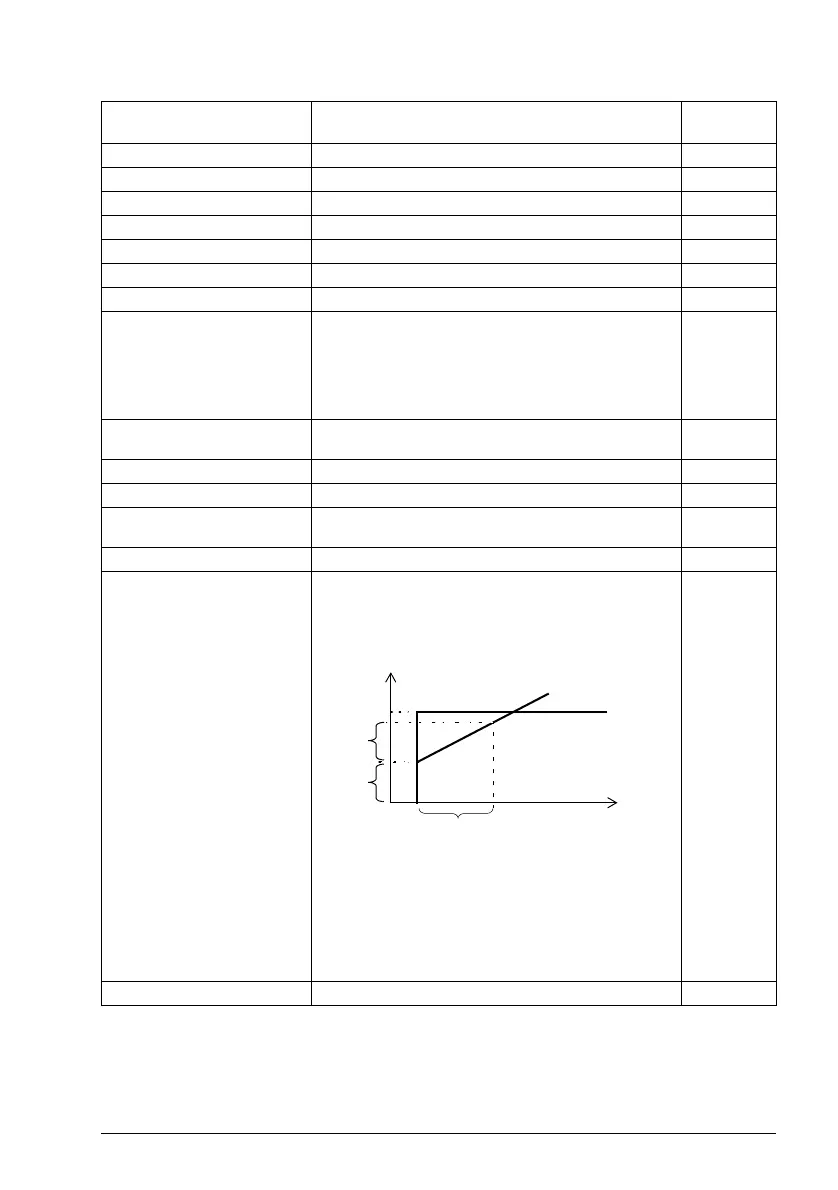
40.33 Set 1 integration time Defines the integration time for the process PID controller.
This time needs to be set to the same order of magnitude
as the reaction time of the process being controlled,
otherwise instability will result.
Note: Setting this value to 0 disables the “I” part, turning
the PID controller into a PD controller.
60.0 s
0.0…9999.0 s Integration time. 1 = 1 s
No. Name/Value Description Default
FbEq 16
Ti
O
I
G × I
G × I
I = controller input (error)
O = controller output
G = gain
Ti = integration time
Time
Error/Controller output
ACS180 FW.book Page 241 Tuesday, March 9, 2021 2:25 PM