364 Fieldbus control through the embedded fieldbus interface (EFB)
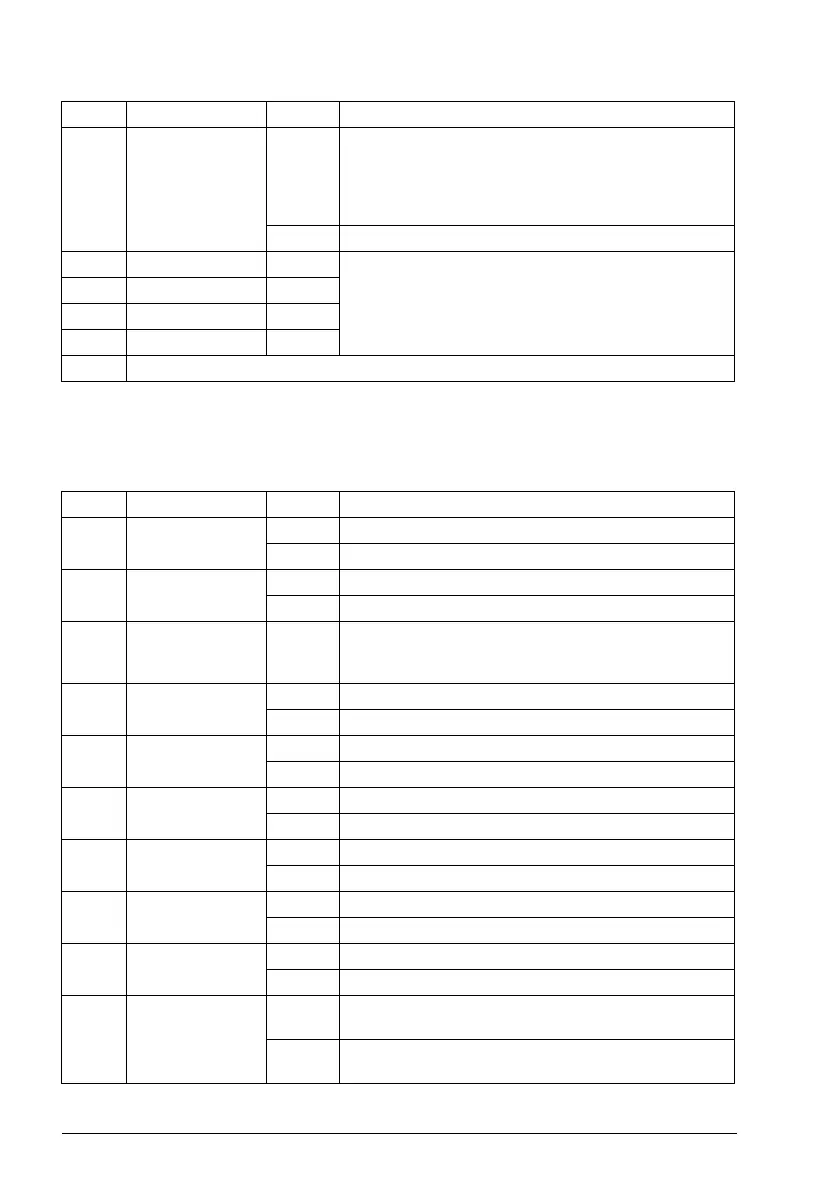
Status Word for the DCU Profile
The embedded fieldbus interface writes the drive Status Word bits 0 to 15 to the
fieldbus Status Word as is. Bits 16 to 32 of the drive Status Word are not in use.
10 ABOVE_
LIMIT
1 Actual frequency or speed equals or exceeds
supervision limit (set by drive parameter). Valid in both
directions of rotation. Set by drive parameters: 46.31,
46.32, 46.33. These parameters are indicated by bit
10 of 06.11 Main status word.
0 Actual frequency or speed within supervision limit.
11 USER_0 Status bits that can be combined with drive logic for
application-specific functionality.
12 USER_1
13 USER_2
14 USER_3
15 Reserved
Bit Name Value State/Description
0 READY 1 Drive is ready to receive the start command.
0 Drive is not ready.
1 ENABLED 1 External run enable signal is active.
0 External run enable signal is not active.
2 Reserved for
ENABLED_TO_R
OTATE
Not yet implemented.
3 RUNNING 1 Drive is modulating.
0 Drive is not modulating.
4 ZERO_SPEED 1 Drive is at zero speed.
0 Drive is not at zero speed.
5 ACCELERATING 1 Not yet implemented.
0 Not yet implemented.
6 DECELERATING 1 Not yet implemented.
0 Not yet implemented.
7 AT_SETPOINT 1 Drive is at setpoint.
0 Drive is not at setpoint.
8 LIMIT 1 Drive operation is limited.
0 Drive operation is not limited.
9 SUPERVISION 1 Actual value (speed, frequency or torque) is above a
limit. Limit is set with parameters 46.31…46.33
0 Actual value (speed, frequency or torque) is within
limits.
Bit Name Value STATE/Description
ACS180 FW.book Page 364 Tuesday, March 9, 2021 2:25 PM