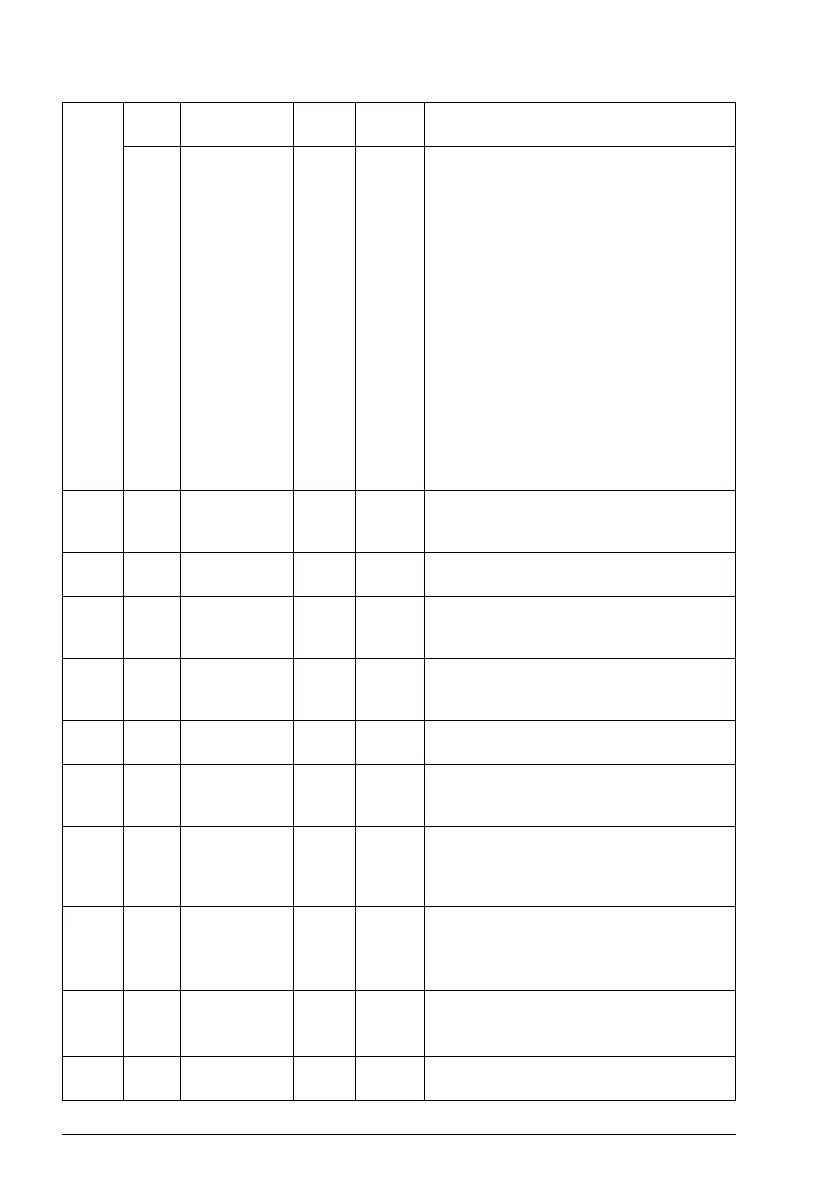
426 Fieldbus control through the embedded fieldbus interface (EFB)
6061h 0 Mode of
Operation
Display
INT8 RO This object provides the actual operation
mode.
The following value definition is valid:
0 = no mode change / no mode assigned
1 = profile position mode (not supported)
2 = velocity mode
3 = profile velocity mode
4 = profile torque mode
5 = reserved
6 = homing mode (not supported)
7 = interpolated position mode (not
supported)
8 = cyclic synchronous position mode (not
supported)
9 = cyclic synchronous velocity mode
10 = cyclic synchronous torque mode
6069h 0 Velocity
sensor actual
value
INT32 RO This object provides the value read from a
velocity sensor.
606Bh 0 Velocity
demand value
INT32 RO This object provides the output value of
the trajectory generator.
606Ch 0 Velocity
actual value
INT32 RO This object provides the actual velocity
value derived either from the velocity
sensor or the position sensor.
6071h 0 Target torque INT16 RWW This object indicates the input value for
the torque controller in profile torque
mode.
6072h 0 Max torque U6 RWW This object indicates the maximum
permissible torque in the motor. 10 = 1%
6073h 0 Max current U6 RWW This object indicates the maximum
permissible torque creating current in the
motor. 10 = 1%
6077h 0 Torque actual
value
INT16 RO This object provides the actual value of
the torque. It shall correspond to the
instantaneous torque in the motor. 10 =
1%
6083h 0 Profile
acceleration
U32 RWW This object defines the commanded
acceleration.
This object is used in the profile velocity
mode.
6084h 0 Profile
deceleration
U32 RWW This object defines the deceleration.
This object is used in the profile velocity
mode.
6087h 0 Torque slope U32 RW This object indicates the rate of change of
torque.
Index
Sub-
index
Name Type Access Description

 Loading...
Loading...










