Rockwell Automation Publication 2097-UM001D-EN-P - November 2012 141
Configure and Start Up the Kinetix 300 Drive Chapter 6
This is the maximum distance in User Units that the motor shaft or
actuator can safely travel during the tuning procedure
10. Apply Enable Input signal for the axis you are tuning.
11. To enable the axis, set the DriveEn bit in RSLogix 5000 software for the
axis being tuned.
12. Click Start.
The Tune gains dialog box opens.
13. Click Yes.
14. Determine if your test completed successfully.
15. Check that the Position Error is in the range of 25…40 mm for safest
operation
16. Select General.
17. From the Drive Mode pull-down menu, choose the mode you desire.
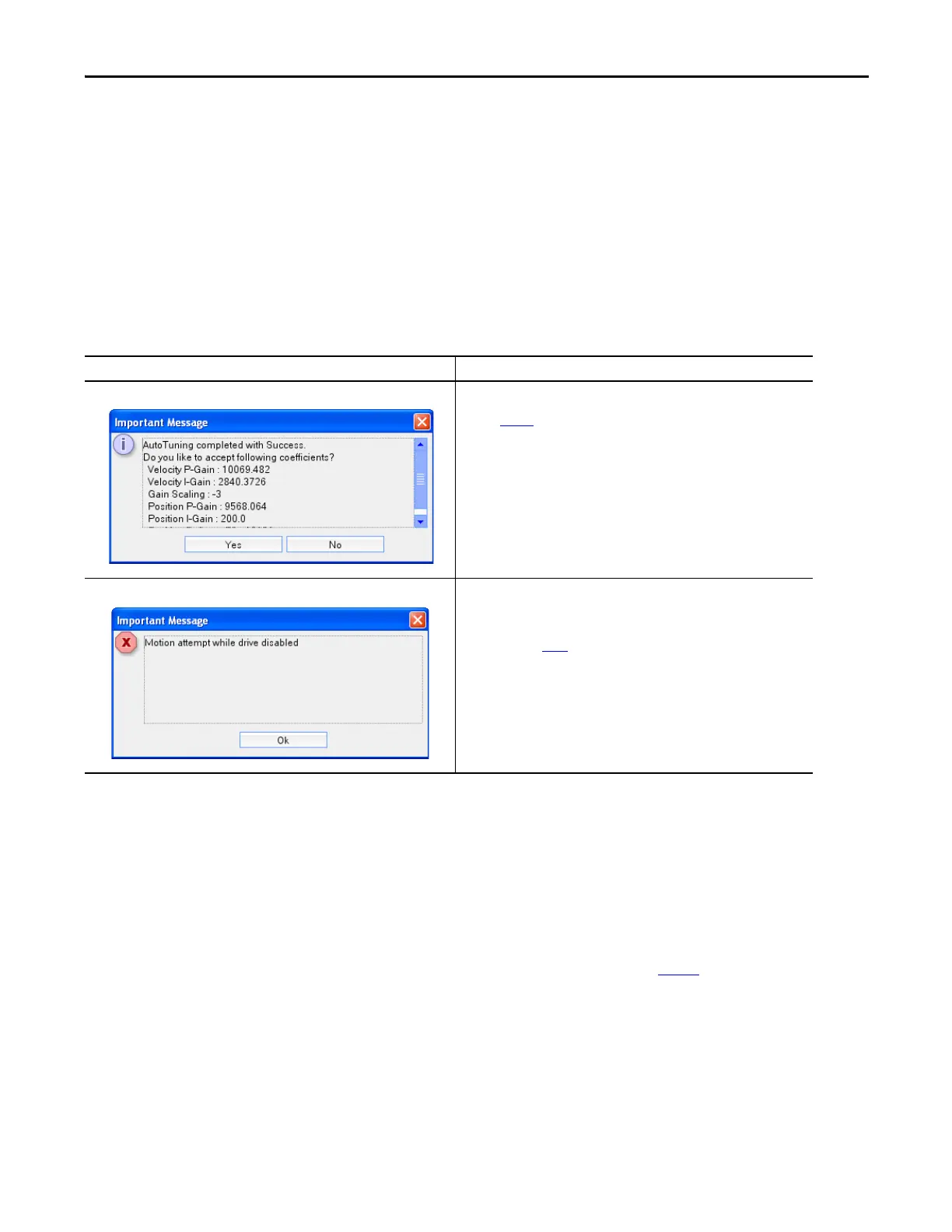
If Then
Your test completed successfully, this dialog box opens. 1. Click Yes.
2. Remove Enable Input signal.
3. Go to step 16.
Your test did not complete successfully, this dialog box opens. 1. Click Ok.
2. Verify that the Enable Input signal is applied to the axis you are testing.
3. Verify the motor feedback is wired as required.
4. Verify the safe torque-off is wired correctly.
5. Return to main step 6 and run the test again.
If motion performance is not what you expected after tuning the drive, several
filters are available to improve performance. These filters are configured from
the Dynamics view of the MotionView software and their placement within the
servo loops are shown in the figure on page 98
.

 Loading...
Loading...






