144 Rockwell Automation Publication 2097-UM001D-EN-P - November 2012
Chapter 6 Configure and Start Up the Kinetix300 Drive
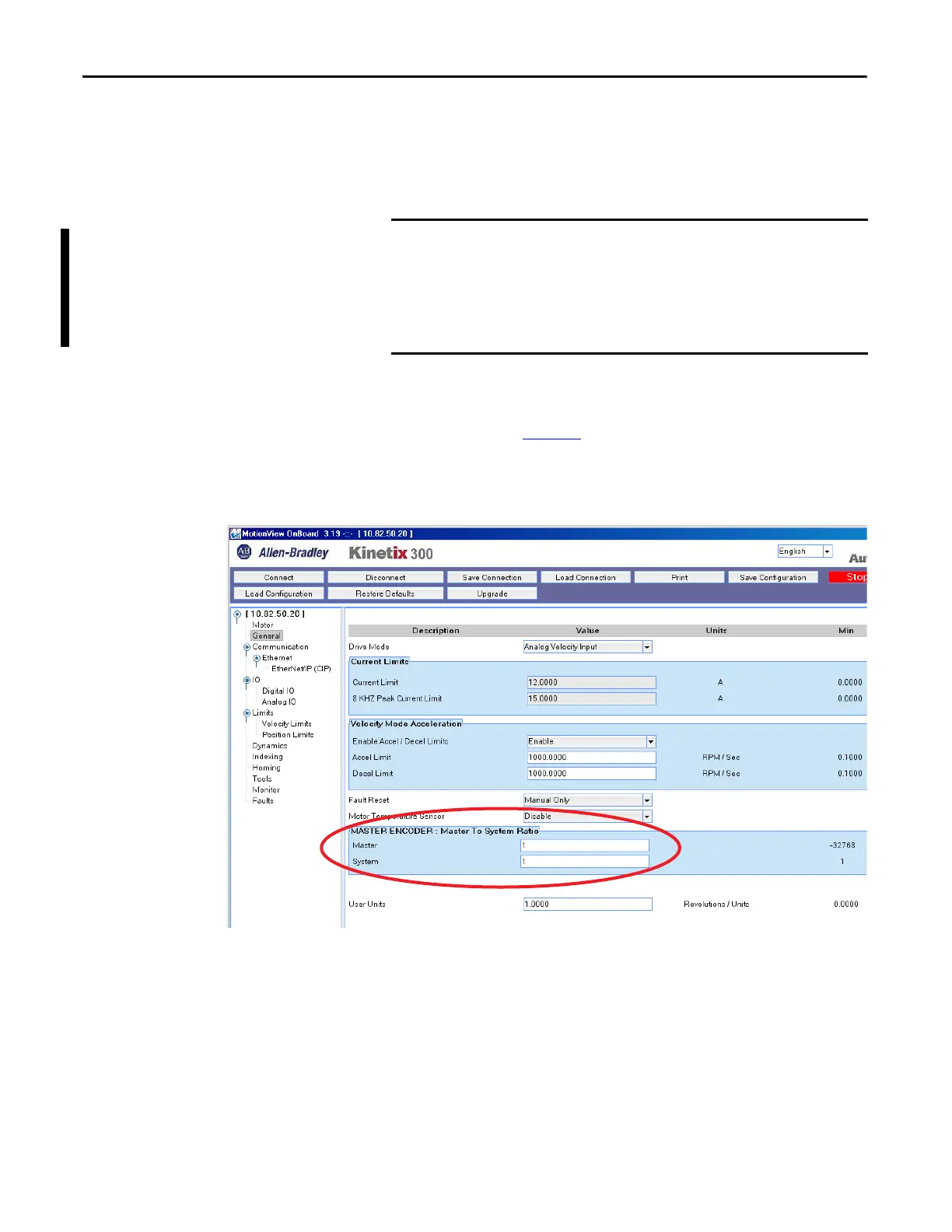
Follow these steps to configure the master gearing ratio.
1. Run the MotionView software.
2. From the Drive Organizer, click General.
3. Determine the ratio of buffered encoder output counts to the number of
system motor counts.
See the examples on page 143
.
4. Enter the values into the Master and System ratio fields.
Use a negative value in the Master field to reverse the relative direction of
the of the drive compared to the master.
The buffered output is supported only for use with incremental
encoder motor feedback. SICK-Stegmann or Tamagawa high-
resolution motor feedback must not be used on the master drive
because they are not capable of generating buffered encoder output
pulses. Conversely, the master gearing input supports only incremental
encoder inputs.

 Loading...
Loading...






