3-18 Wiring
P/N 0013-1027-005 Rev A
Serial Ports
There are two serial ports on a PDM. Serial port 1 is on connector P7 and serial port 2 is on
connector P6. The optional Operator Terminal is connected to the PDM through serial port 1 on
P7. Serial port 2 on P6 is used as the programming port for a PC that is running IQ Master. Serial
port 2 is also the serial port used for Host communications.
Data may be sent to, or received from either serial port by an application program. The appli-
cation may use a PRINT statement to send data and a READ statement to receive data. Refer to
the IQ Master Instruction Manual for detailed information.
Several parameters select the operating mode for serial communications. Both ports support
either RS-232C or RS-422 communications. The ports operate at baud rates of 1200, 2400, 4800,
9600, or 19200. Refer to the IQ Master Instruction Manual for detailed information.
The default setup for the serial ports is:
Host Computer
Serial Port 2 on connector P6 provides the communication interface between the PDM and the
personal computer used for programming and configuration. This is also the serial port that
must be used for Host communications.
One or more IQs may be installed on an RS-422 multi-drop network or an RS-232C daisy-chain
network. If more than one IQ is in the network, each must have a unique address selected on
the SW1 dip switch. Refer to“Networking IQ 2000/5000 Controls” on page 3-21 for more
information.
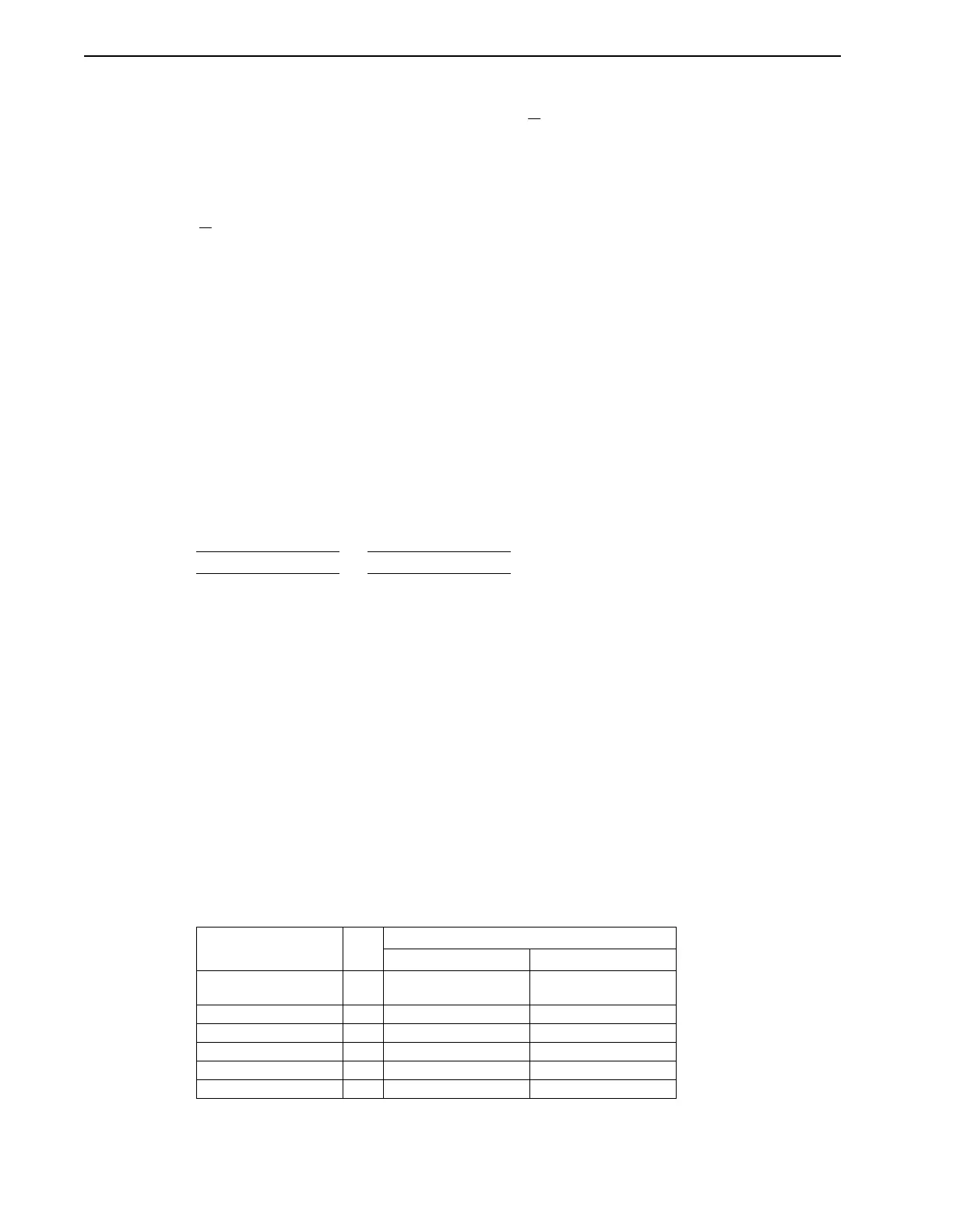
TABLE 3.12 Host Computer and Signal Name
Intro
Serial Port 1 Serial Port 2
9600 baud 9600 baud
No parity No parity
8 data bits 8 data bits
1 stop bit 1 stop bit
Handshaking ON Handshaking ON
RS-232C protocol RS-232C protocol
Connector Pin
Signal Name
RS-232 RS-422
P6
Serial Port 2
1 No connection RXD+
2RXD RXD-
3TXD TXD-
4 No connection TXD+
5 common common
6 Shield Shield
Motor Encoder Counts = (N step pulses)
a
b
Motor Encoder Counts = The distance the motor moves
N step pulses The number of pulses from an indexer
a
b
The software gear ratio
=
=