ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05 Chapter C: System functions
Operation & Software Manual
Direct Drives & Systems 131
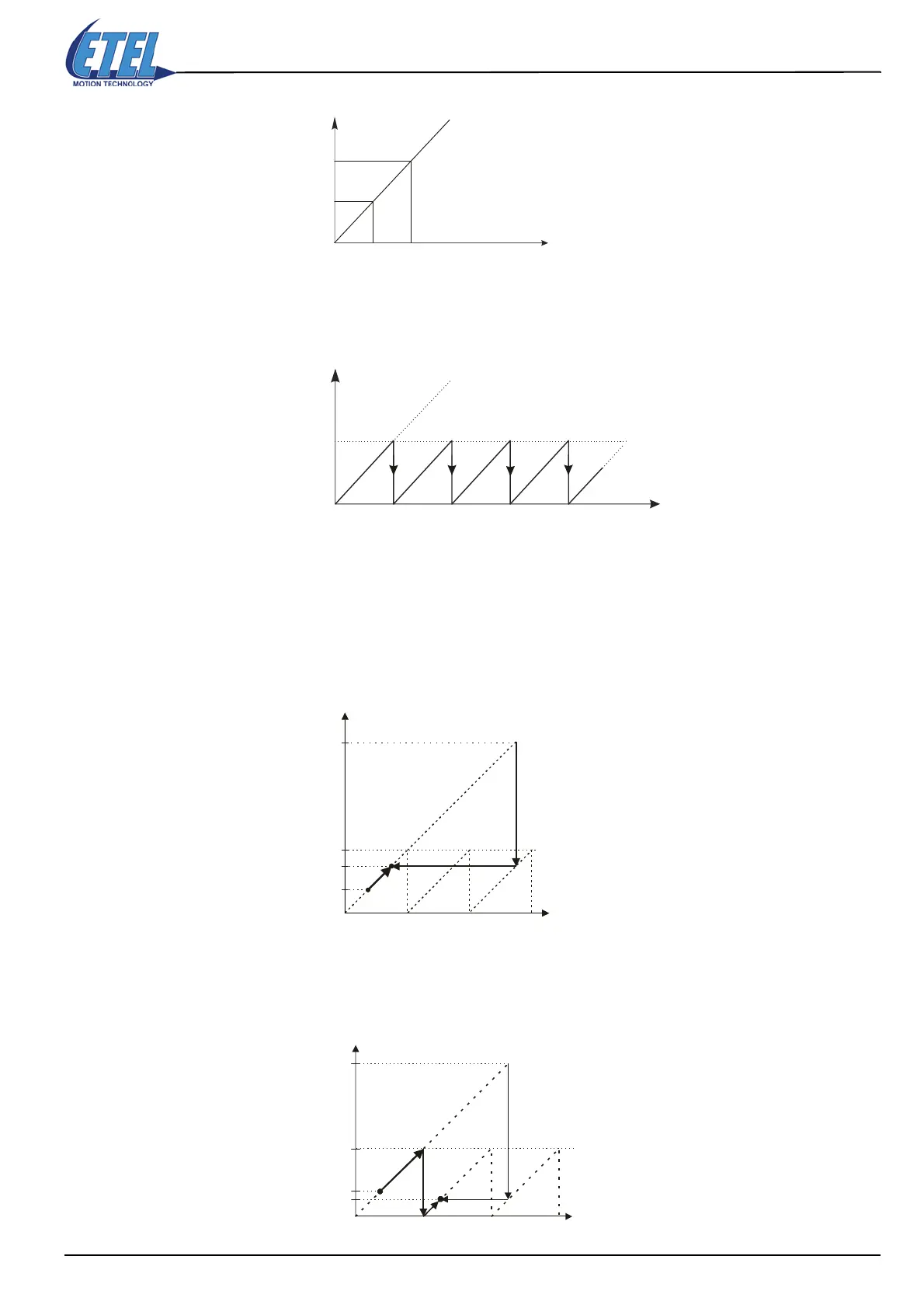
The measured position increases continuously and after a lapse of time, it will be so big that the controller's
position counter will not be able to handle it (counter overflow).
To avoid it, as soon as the motor reaches the position programmed in parameter K27, the position counter is
brought back to the value 0.
If K27= 40000 (user defined number of increments), the position measurement versus time will be:
Remark: It is recommended to set parameter K27 to the value corresponding to one complete machine
cycle.
If a position target is given over the limit (|Xref| > K27), it is brought back to a value: 0<Xfinal<K27
Example 1:
Xstart=15000
POS.1=110000 or POS.1+=95000 (means: Xref=110000 > K27=40000)
Xfinal=30000 (brought back to a value < K27)
Example 2:
Xstart=15000
POS.1=90000 or POS.1+=75000 (means: Xref=90000 > K27=40000)
Xfinal=10000 (brought back to a value < K27)
2nd turn
1st turn
40000
80000
0
Position [increment]
time
Position [incr]
K27=40000
0
time
Position [incr]
time
K27=40000
Xref=110000
Xfinal=30000
Xstart=15000
Position [incr]
time
K27=40000
Xref=90000
Xfinal=10000
Xstart=15000

 Loading...
Loading...
