Operation & Software Manual
334
Direct Drives & Systems
Chapter E: Appendixes ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
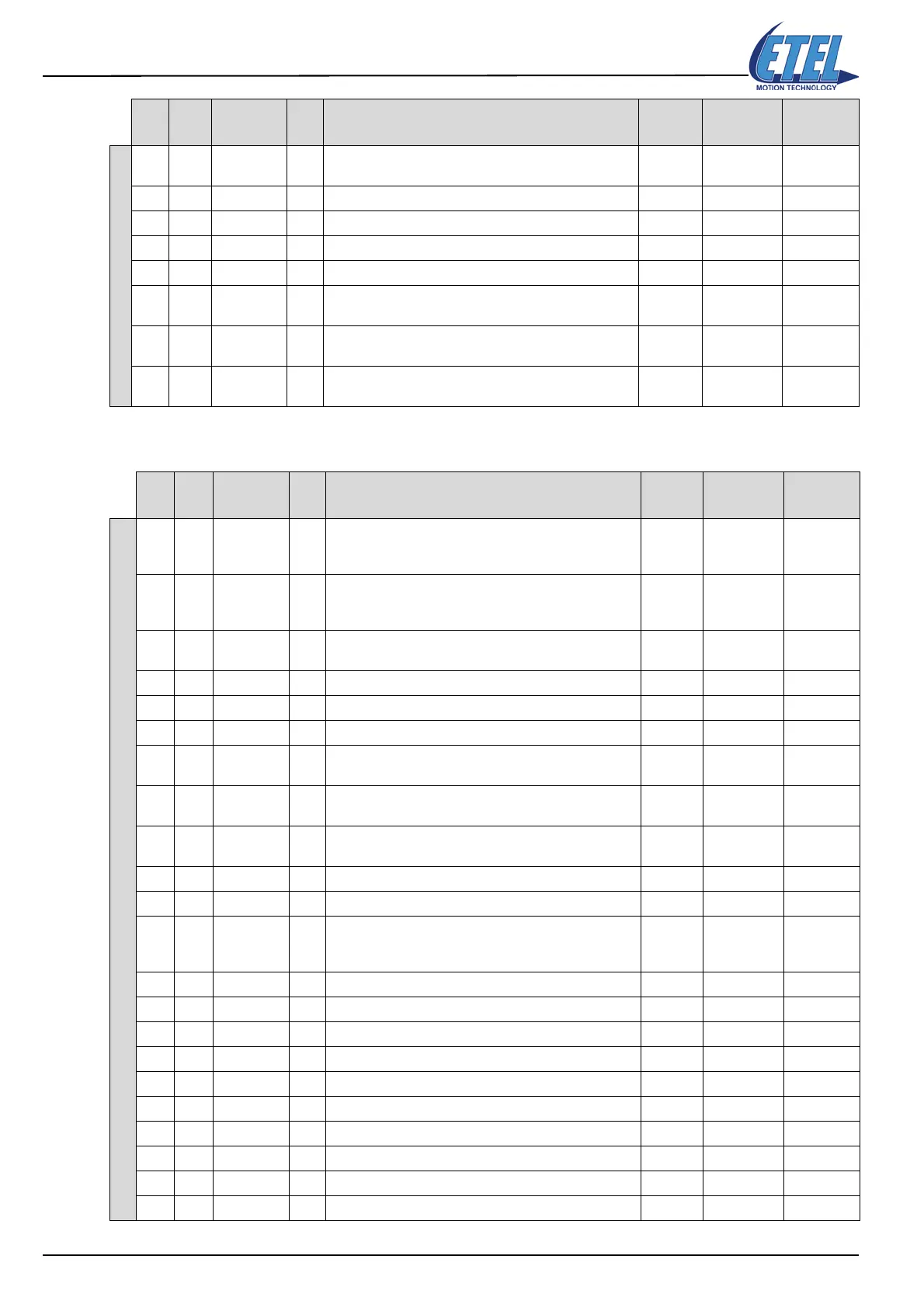
17.4 Monitorings M for DSCDM
DSCDL monitorings
M176
Real state of DSO-HIO analog output 4. Takes K173,
K150, K151 and K154 to K158 into account
0 -8192 8192
M239 Encoder period 1 1 2147483647
M240 Motor type 0 0 1
M241 Encoder interpolation factor 0 0 32768
M242 Controller quartz frequency [Hz] 30000000 30000000 30000000
M243
Controller current loop time factor (cti). M243/M242 =
time in second
417 417 417
M244
Controller fast interrupt time factor (fti). M244/M242 =
time in second
1667 1667 1667
M245
Controller slow interrupt time factor (sti). M245/M242 =
time in second
15000 15000 15000
M Alias Values
Bit #
<P1>
Comment for monitorings M
and <P1> of the DSCDM
Def. Val
<P1>
Min. Val
<P1>
Max. Val
<P1>
DSCDM monitorings
M0
Theoretical position (dpi). Takes the scaling/mapping
correction into account but does not take care of SET
command and K50
0 -2147483648 2147483647
M1
Real position (dpi). Takes the scaling/mapping
correction into account but does not take care of SET
command and K50
0 -2147483648 2147483647
M2
Tracking error. This is the difference between M0 and
M1
0 -2147483648 2147483647
M3 Maximum tracking error during movement 0 0 2147483647
M4 Offset between dpi and upi. [upi] = ([dpi] + M4) >>K50 0 -2147483648 2147483647
M5 Offset due to the homing (dpi) 0 -2147483648 2147483647
M6
Theoretical position (upi). Takes SET command, K50
and the scaling/mapping correction into account
0 -2147483648 2147483647
M7
Real position (upi). Takes SET command, K50 and the
scaling/mapping correction into account
0 -2147483648 2147483647
M8
Theoretical position (dpi). Does not take SET command,
K50 and scaling/mapping correction into account
0 -2147483648 2147483647
M10 Theoretical velocity (dsi) 0 -2147483648 2147483647
M11 Real velocity (dsi) 0 -2147483648 2147483647
M12
Real position (upi) captured on DIN. Takes SET
command, K50 and scaling/mapping correction into
account
0 -2147483648 2147483647
M13 Position given by the secondary encoder (dpi) 0 -2147483648 2147483647
M14 Theoretical acceleration (dai) 0 -2147483648 2147483647
M17 Reference value for mode K61=0, 1, 3, 4 and 36 0 -2147483648 2147483647
M20 Real current in phase 1 0 -32768 32767
M21 Real current in phase 2 0 -32768 32767
M22 Real current in phase 3 0 -32768 32767
M23 Current reference in phase 1 0 -32768 32767
M24 Current reference in phase 2 0 -32768 32767
M25 Current loop look-up table value of phase 1 0 -32768 32767
M26 Current loop look-up table value of phase 2 0 -32768 32767
M Alias Values
Bit #
<P1>
Comment for monitorings M
and <P1> of the DSCDL
Def. Val
<P1>
Min. Val
<P1>
Max. Val
<P1>

 Loading...
Loading...
