Operation & Software Manual
138
Direct Drives & Systems
Chapter C: System functions ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
13.1.2 Regulators parameters
The position feedback is controlled by a state regulator, which can be approximated to a proportional-integral-
derivative (PID) regulator. The position state regulator's parameters are:
13.1.2.1 Position regulator's gains and limits
Parameters K1, K2 and K4 define the position regulator's PID. Parameter K1 is proportional to the motor
position error x
e
; it is used to make the position regulator more reactive. The integral gain (parameter K4) will
reduce oscillations and suppress a permanent error on the position. Parameter K2 is proportional to the speed
(and not the speed error), thus it acts as a pseudo-derivative gain.
Parameter K3 (motor force feedback gain) is rarely used. It may be used sometimes when the advanced filters
and the filter set by parameters K9 and K10 are not able to suppress low frequency oscillations (range: around
500Hz) on the position loop output (force reference Fc).
Parameter K5 (anti-windup) works together with parameter K60 (the force (or current) reference limitation).
Parameter K60 is automatically set to protect the motor against a too high force reference (Fc) coming from
the state regulator. For an optimal operation, parameter K60 should never be reached, or should limit Fc only
for very short times. If parameter K60 is often reached and for long times, it means that the motor is under-
dimensioned in comparison with its load. In that case, parameter K5 should be used to compensate the state
regulator saturation. When parameter K60 is active, the low motor’s force needs a too long time to reach a far
position. During that time, the integrator reaches a high value. When the position is reached, Fc should invert
its direction, but it is impossible because the integrator is full. To avoid the problem, parameter K5 will subtract
a value from the integrator’s input (parameter K4), but only when parameter K60 is active (state regulator
saturated).
Parameter K6 is the integrator's max. and min. values.
Parameters K20 and K21 are feedforward parameters. During a movement, a permanent error may appear
between the position reference and the motor's real position. This drag can be due to mechanical friction. It is
possible to compensate it with the feedforward parameters. These parameters will increase 'a-priori' (with
anticipation, without reading the real drag) the speed and acceleration command inputs to the state regulator.
The speed feedforward will compensate the drag's constant part and the acceleration feedforward will
compensate the undershoot and overshoot remaining after the speed feedforward compensation. To have the
optimum value, set K20 = K2 (they have the same unit).
Note: Parameters K20 and K21 can be used with all reference modes (parameter K61)
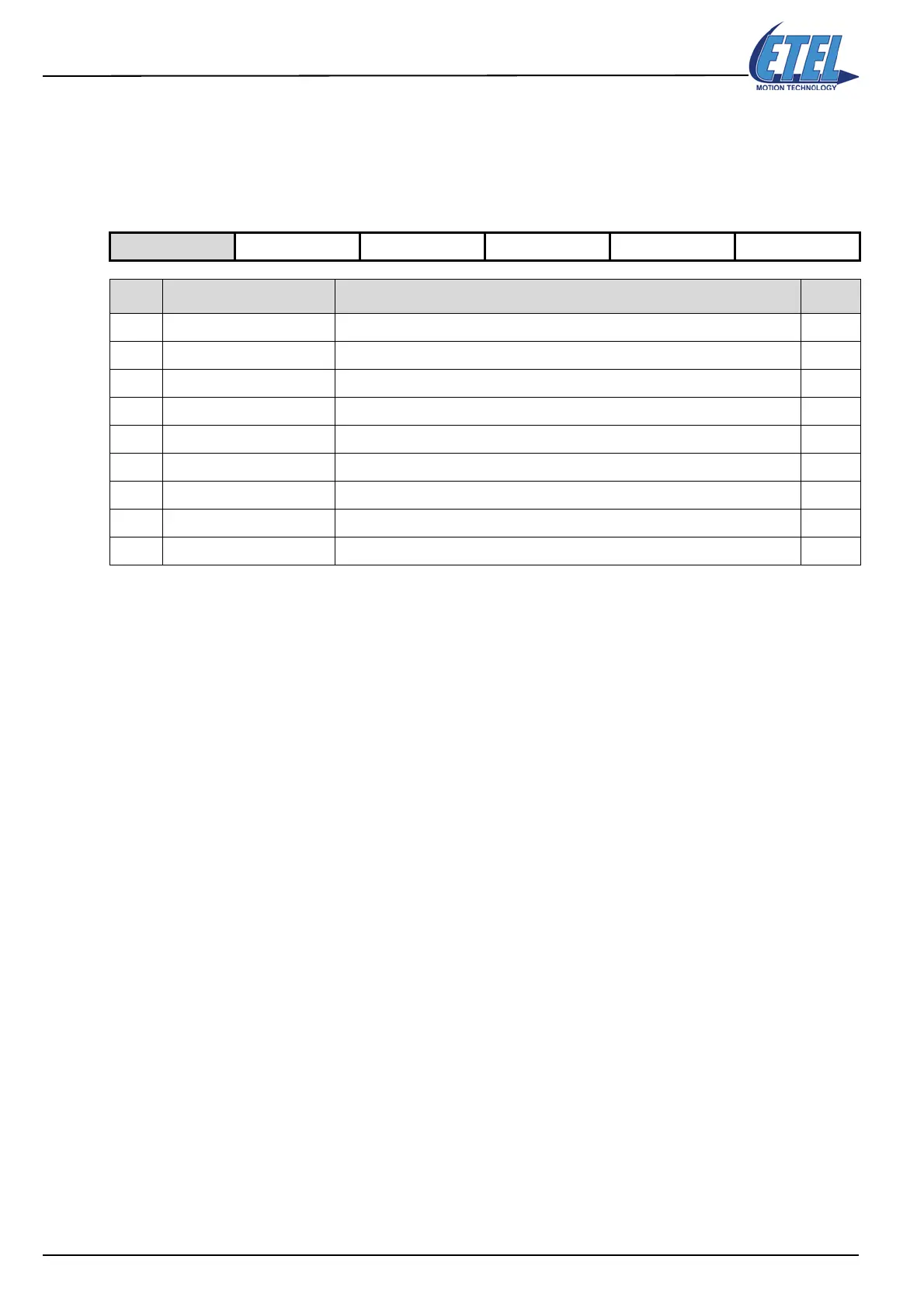
Available on DSC2P DSC2V DSCDP DSCDL DSCDM
K Name Comment Units
K1 P gain position Position loop's proportional gain -
K2 D gain position Position loop's speed feedback gain -
K3 Force feedback gain position Position loop's force/torque feedback gain -
K4 I gain position Position loop's integrator gain -
K5 anti-windup gain Position loop's anti-windup gain. -
K6 Integrator limit Position loop's integrator limit -
K20 Speed feedforward Position loop's speed feedforward gain -
K21 Acceleration feedforward Position loop's acceleration feedforward gain -
K60 Maximum force limit Theoretical software force/torque limit (regulator output) [foi], [toi]

 Loading...
Loading...
