Operation & Software Manual
20
Direct Drives & Systems
Chapter A: Internal functioning & architecture ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
3. Set point generator
The set point generator calculates the motor position, speed and acceleration references. These references
are introduced in the position regulator. This calculation is made according to the type of requested movement,
the final position to reach, maximum authorized speed and acceleration. The set point generator carries out
one of the most important functions of the controller: the movement calculation.
3.1 Introduction to movements trajectories
Note: From the movements described below, the controller uses only the step movement (for
tuning) and the S-Curve movement (for motors movements in applications).
The users interested in the movements equations (order 0,1,2 and 3) can refer to Chapter C
(§13.3.11
).
A movement trajectory is a function which represents the position of a mobile in one direction versus time.
The first derivative of this function gives the speed trajectory of the movement (speed versus time). The
second derivative determines the acceleration trajectory of the movement (acceleration versus time). The
third derivative is called the jerk trajectory of the movement (jerk versus time).
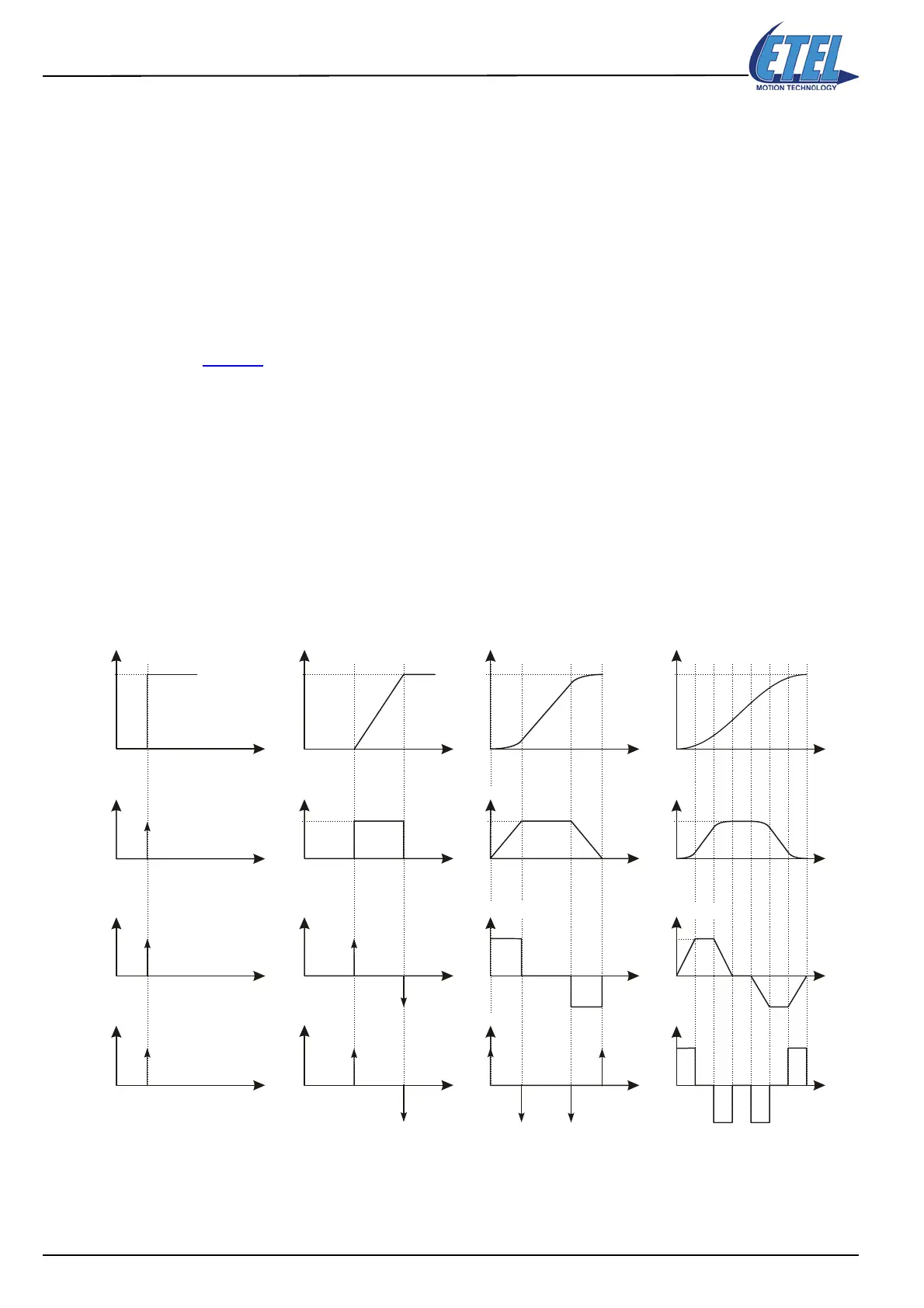
The step movement is a very abrupt movement in which the motor position changes instantaneously. The
rectangular movement whose speed trajectory is a rectangle, is a specific case of trapezoidal movement. The
trapezoidal movement is a movement whose speed trajectory is a trapezium and the S-Curve movement is
a movement which is a step ahead from the trapezoidal movement (trapezoidal acceleration), it is the smoother
movement, but for an identical maximum speed, the movement takes more time.
Step movement
(order 0)
Rectangular movement
(order 1)
Trapezoidal movement
(order 2)
S-Curve movement
(order 3)
Position Position Position Position
Speed Speed Speed Speed
Acceleration Acceleration Acceleration Acceleration
Jerk Jerk Jerk Jerk
t ttt
t ttt
t ttt
t ttt
X
final
X
final
X
final
X
final
V
max
V
max
V
max
a
max
a
max
J
max

 Loading...
Loading...
