ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05 Chapter C: System functions
Operation & Software Manual
Direct Drives & Systems 85
12.3 Position encoder
The position encoder's K parameters described below are only set once. Generally, they are automatically set
with ETEL Tools (refer to §8.
).
The position encoder is the device enabling the motor to measure its position. It is made up of two parts: the
head, connected to the motor, and the scale, which is fixed. Parameter K79 allows the user to select the type
of encoder(s) used on the controller.
Remark: Monitoring M13 allows the user to display the position given by the secondary encoder (for DSC2P
and DSC2V). It is also available with K79=21, 23 and 24 for DSCDP, DSCDM and DSCDL. To
interpret this value, parameters K27, K50 and K69 or K77 must be taken into account according
to the type of encoder (refer to §13.3.10
and §13.10 for more information about parameters K69
and K77 and to §13.3.10
for parameter K50).
Monitoring M5 allows the user to display the distance (dpi) covered due to the homing (used in the
case of external reference with the Macro optional board for example).
If parameter K68 is modified, the command AUT=10 must be executed to re-calculate parameters
K53 and K56.
Parameter K79 is only read when the controller is switched on and must be saved with SAV
command when it is changed and then the controller must be switched off and on to integrate this
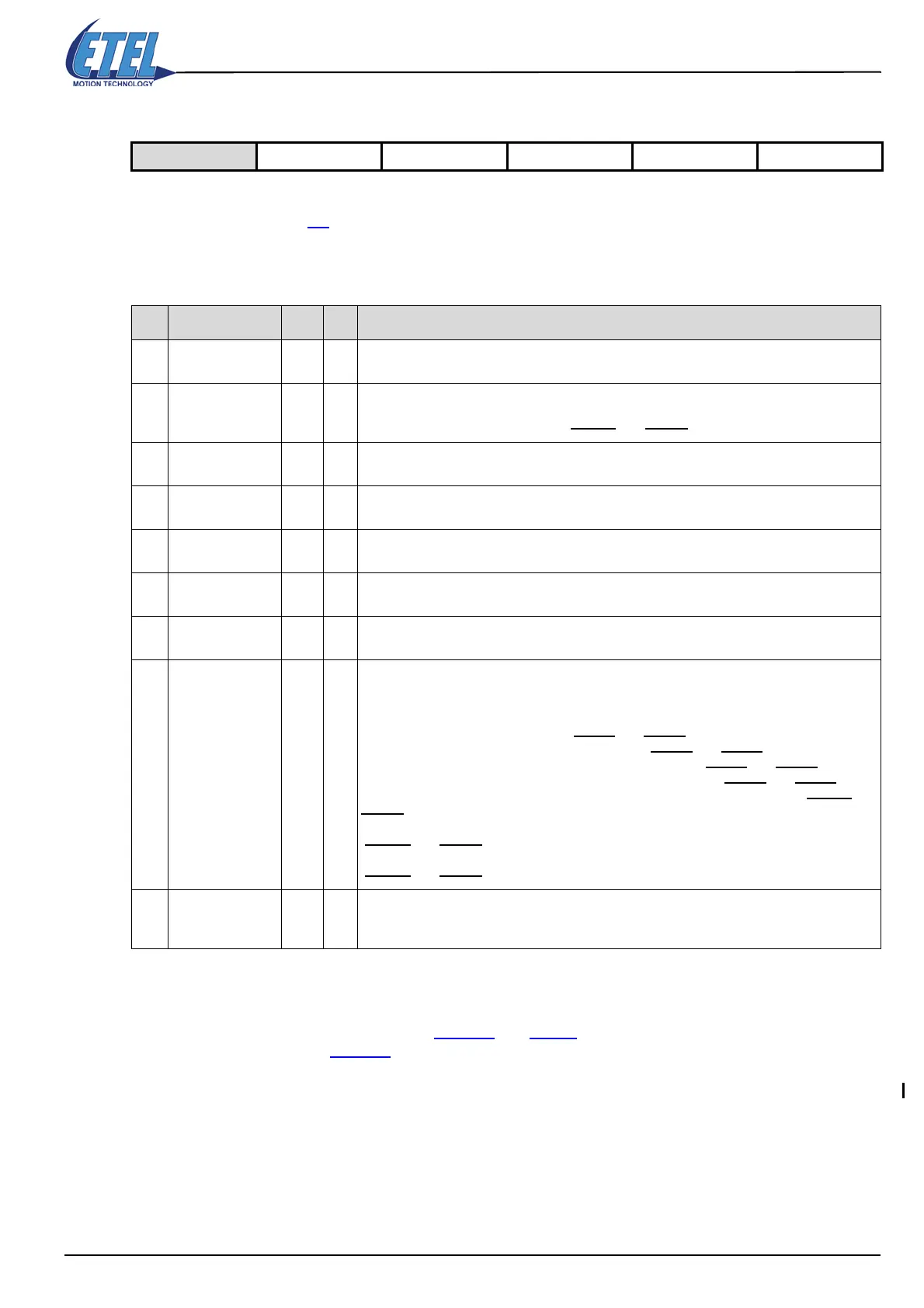
Available on DSC2P DSC2V DSCDP DSCDL DSCDM
K Name Value Bit # Comment
K55
Encoder position
increments factor
--
With rotary encoder: number of [dpi] / motor revolution period
With linear encoder: number of [dpi] / motor magnetic period
K68
Encoder reading
way inversion
1
2
4
0
1
2
Analog 1 Vptp or EnDat 2.1 encoder reading way is inverted.
TTL encoder reading way is inverted.
Inverts force reference from MACRO (DSCDM
and DSCDL)
K70
Encoder sine offset
correction
- - Correction of the sine signal offset.
K71
Encoder cos offset
correction
- - Correction of the cosine signal offset.
K72
Encoder sine ampl.
correction
- - Correction of the sine signal amplitude.
K73
Encoder cos ampl.
correction
- - Correction of the cosine signal amplitude.
K75
Distance between
two indexes
- - Average distance between two indexes with the multi-ref. marks scales.
K79
Encoder type
selection
0
1
4
7
20
21
23
24
100
101
104
-
1 Vptp analog encoder selection (secondary = TTL for DSC2P and DSC2V)
TTL encoder selection (secondary = 1 Vptp for DSC2P and DSC2V)
EnDat 2.1 encoder selection (secondary = TTL for DSC2P and DSC2V)
TTL encoder selection (secondary = EnDat 2.1) (only on DSC2P and DSC2V)
Stepper in open loop without encoder (DSC2P
and DSC2V)
Stepper in open loop with reading of a TTL encoder (DSC2P
and DSC2V)
Stepper in open loop with reading of a 1 Vptp analog encoder (DSC2P
and DSC2V)
Stepper in open loop with reading of a EnDat 2.1 analog encoder (DSC2P
and DSC2V)
Macro mode: Analog encoder selection (1 Vptp) (Secondary = TTL for DSC2P) (DSCDM
and
DSCDL
)
Macro mode: TTL encoder selection (secondary = analog encoder 1 Vptp for DSC2P)
(DSCDM
and DSCDL)
Macro mode: EnDat 2.1 encoder selection (secondary = TTL encoder selection for DSC2P)
(DSCDM
and DSCDL)
K241 Encoder period - -
Encoder period in [nm] (linear encoder) or number of periods per turn (rotary encoder). Depth 0
for primary encoder and depth 1 for secondary encoder (depth 1 is ONLY available on
DSC2P and DSC2V)

 Loading...
Loading...
