Operation & Software Manual
156
Direct Drives & Systems
Chapter C: System functions ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
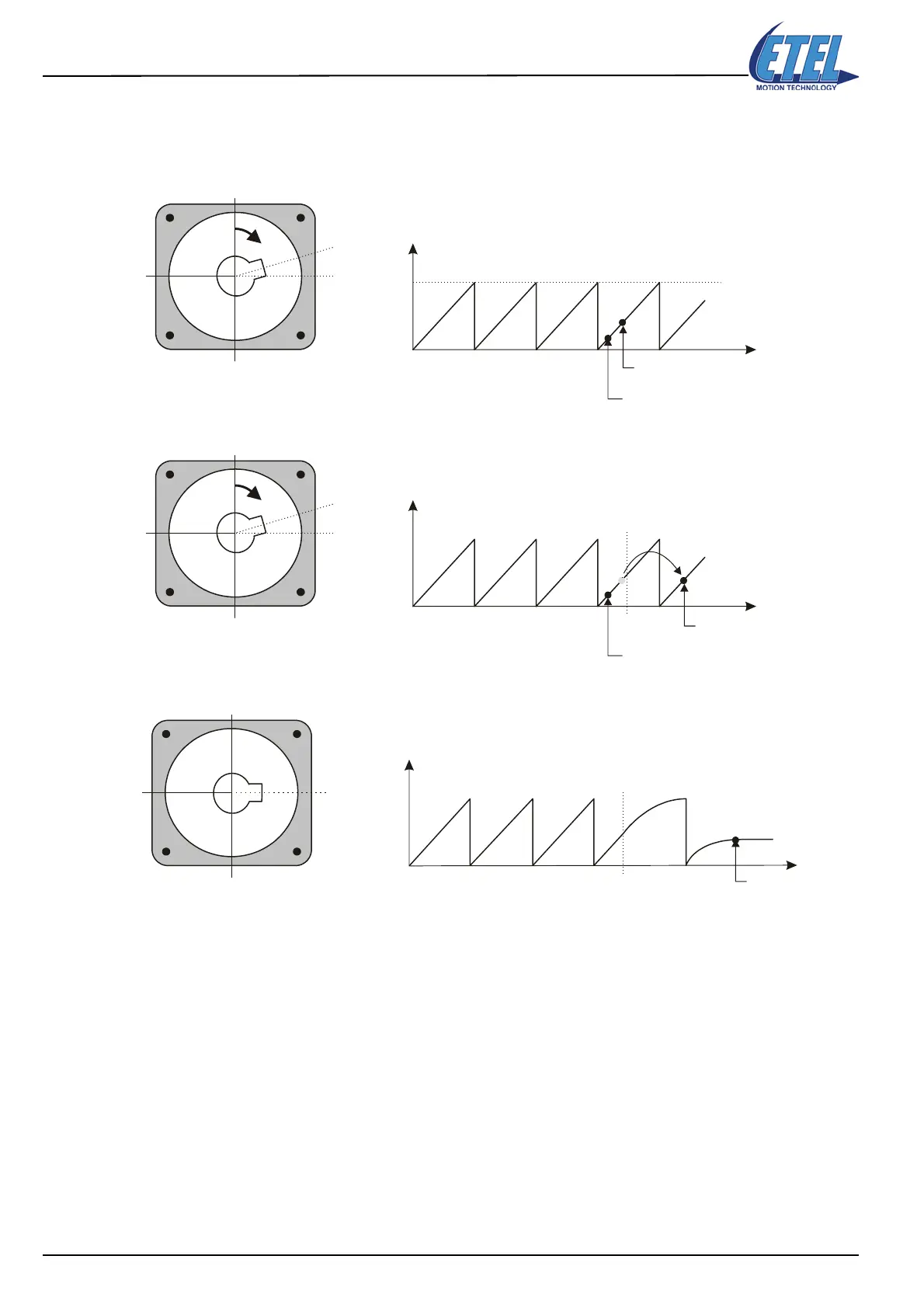
The user can stop the motor in the position X1 by sending the command POS.x = X. If the distance between
the current motor position and the position to reach (X1) is too small to stop the motor with the acceleration in
parameter K212 (negative = deceleration), the motor will make one more turn to stop correctly.
Step 1: POS.x = X
Step 2
Step 3
current pos.
pos. to
reach
current position
pos. to reach (X1)
X
t
new position to reach
current position
pos. to
reach
start of the deceleration (K212)
X
t
current pos.
position reached
position
reached
start of the deceleration (K212)
X
t

 Loading...
Loading...
