Operation & Software Manual
160
Direct Drives & Systems
Chapter C: System functions ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
The bits set to 1 mean that the values programmed at the defined depth will be kept to replace the values at
the depth 0. The reserved bits must be set to 0.
Caution: When the whole bits field is equal to 0, the controller considers that all bits are equal to 1!
Example:
PWR.1=1, IND.1, WTM.1 commands are from now on omitted to avoid example overloading.
MMD.1=1 ;Selects the S-Curve movement
ACC.1=500000 ;Defines a
max
at the depth 0
SPD.1=200000 ;Defines v
max
at the depth 0
ACC:1.1=700000 ;Defines a
max
at the depth 1
SPD:1.1=400000 ;Defines v
max
at the depth 1
POS:1.1=200000 ;Defines x
final
at the depth 1. The motor does not move. Only a POS at the depth 0
can move the motor.
ACC:2.1=600000 ;Defines a
max
at the depth 2.
SPD:2.1=300000 ;Defines v
max
at the depth 2.
POS:2.1=800000 ;Defines x
final
at the depth 2.
At this moment the motor has not moved yet but all the values are stored at different depths.
POS.1=300000 ;The motor moves to the position 300000 with an acceleration of 500000 and a speed
of 200000 increments.
STA.1=2,7 ;Starts a movement with the values contained at the depth 2. The motor moves to the
position 800000 with an acceleration of 600000 and a speed of 300000 increments.
STA.1=1,7 ;Starts a movement with the values contained at the depth 1. The motor moves to the
position 200000 with an acceleration of 700000 and a speed of 400000 increments.
Remark: STA and STI commands copy at the depth 0, the POS, SPD, ACC and JRT values contained at
the depth where the movement will be executed. Therefore each STA or STI execution will see
the depth 0 values crushed. In the above example, after executing the first STA command
(STA.1=2,7), the acceleration of 500000, the speed of 200000 which were initially at the depth 0
are lost. However, all the others at the depths other than 0 remain unchanged.
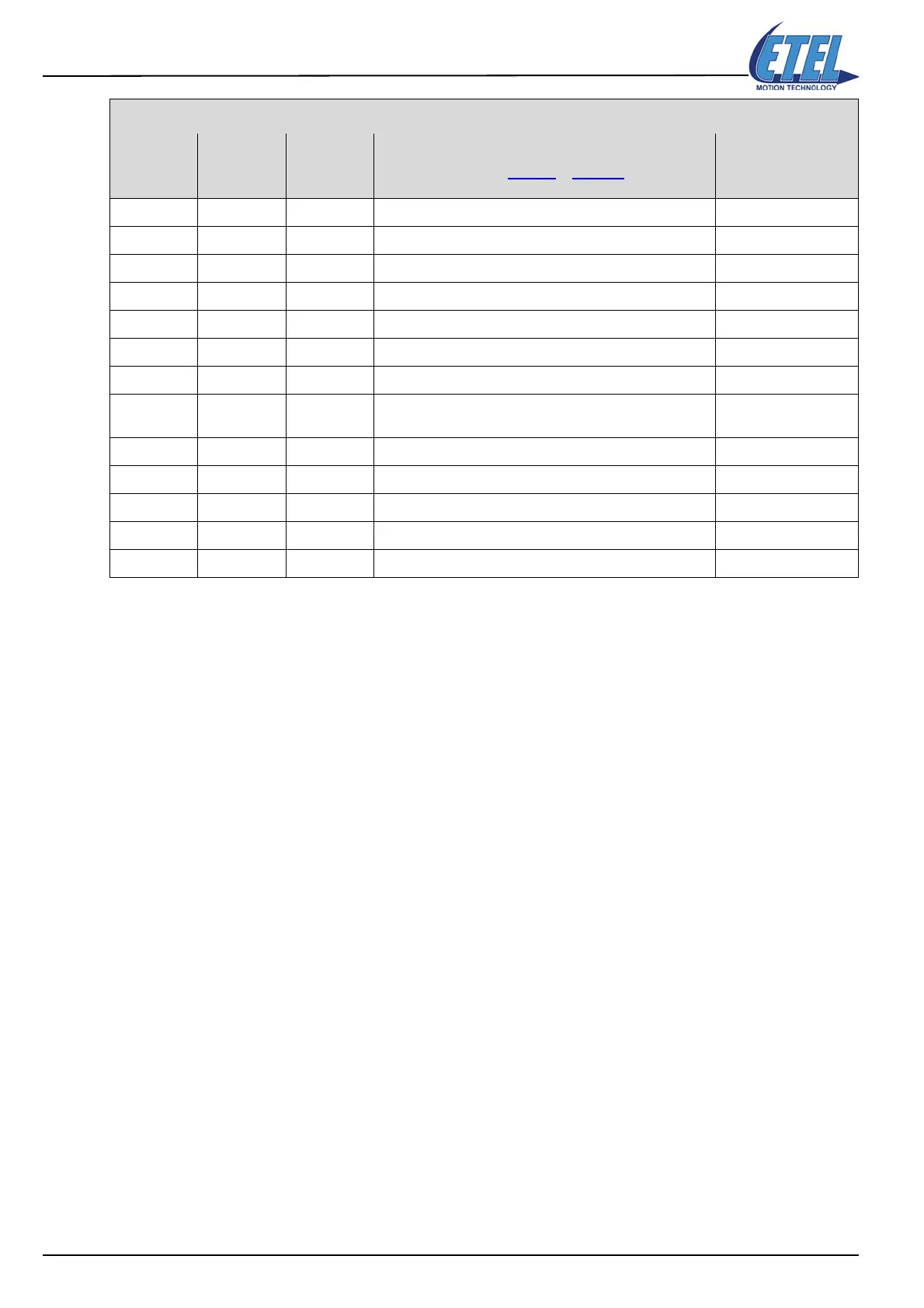
STA and STI commands: bits mask description for values in <p2>
Movement
parameter
in the mask
Bit value Bit #
Parameter function
(refer to §12.10.3
& §13.3.1.1)
Behavior with
S-Curve concatenated
movements (MMC=1)
K210 1 0 Position to reach (alias is POS command) Recaptured
K211 2 1 Limit speed (alias is SPD command) Recaptured
K212 4 2 Limit acceleration (alias is ACC command) Recaptured
K213 8 3 Jerk time (alias is JRT command) Ignored
- - 4 Reserved for future use -
- - 5 Reserved for future use -
K202 64 6 Movement type (alias is MMD command) Ignored
K203 / K207 128 7 LKT number (alias is LTN command) / LKT start and end
positions
Ignored
K204 256 8 Execution time of the LKT (alias is LTI command) Ignored
K208 512 9 LKT maximum stroke Ignored
K209 1024 10 Way of rotation movement Ignored
K230 2048 11 Calculated movement (predefined profile) time Ignored
K229 4096 12 Calculated movement (predefined profile) type Ignored

 Loading...
Loading...
