Operation & Software Manual
164
Direct Drives & Systems
Chapter C: System functions ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
Examples with LKT movements:
Remark: If the MMC command does not appear in the sequence, the movements without concatenation
mode are used by default.
Example:
Concatenated movements are simple to execute. Just select the concatenated movements mode and execute
the memorized movements at different depths.
MMD.1=1 ;Selects the S-curve movement.
MMC.1=1 ;Selects the concatenated movements mode.
ACC.1=500000 ;Defines a
max
at the depth 0.
SPD.1=200000 ;Defines v
max
at the depth 0.
ACC:1.1=700000 ;Defines a
max
at the depth 1.
SPD:1.1=400000 ;Defines v
max
at the depth 1.
POS:1.1=200000 ;Defines x
final
at the depth 1. The motor does not move. Only the POS command at
the depth 0 can move the motor.
POS.1=100000 ;The motor moves to the position 100000
STA.1=1,... ;The memorized movement at the depth 1 is started. If the first movement is not
finished, it is interrupted. The motor will increase its speed because the movement
speed at the depth 1 is higher than that of the previous movement and it will finally
stop at the position 200000.
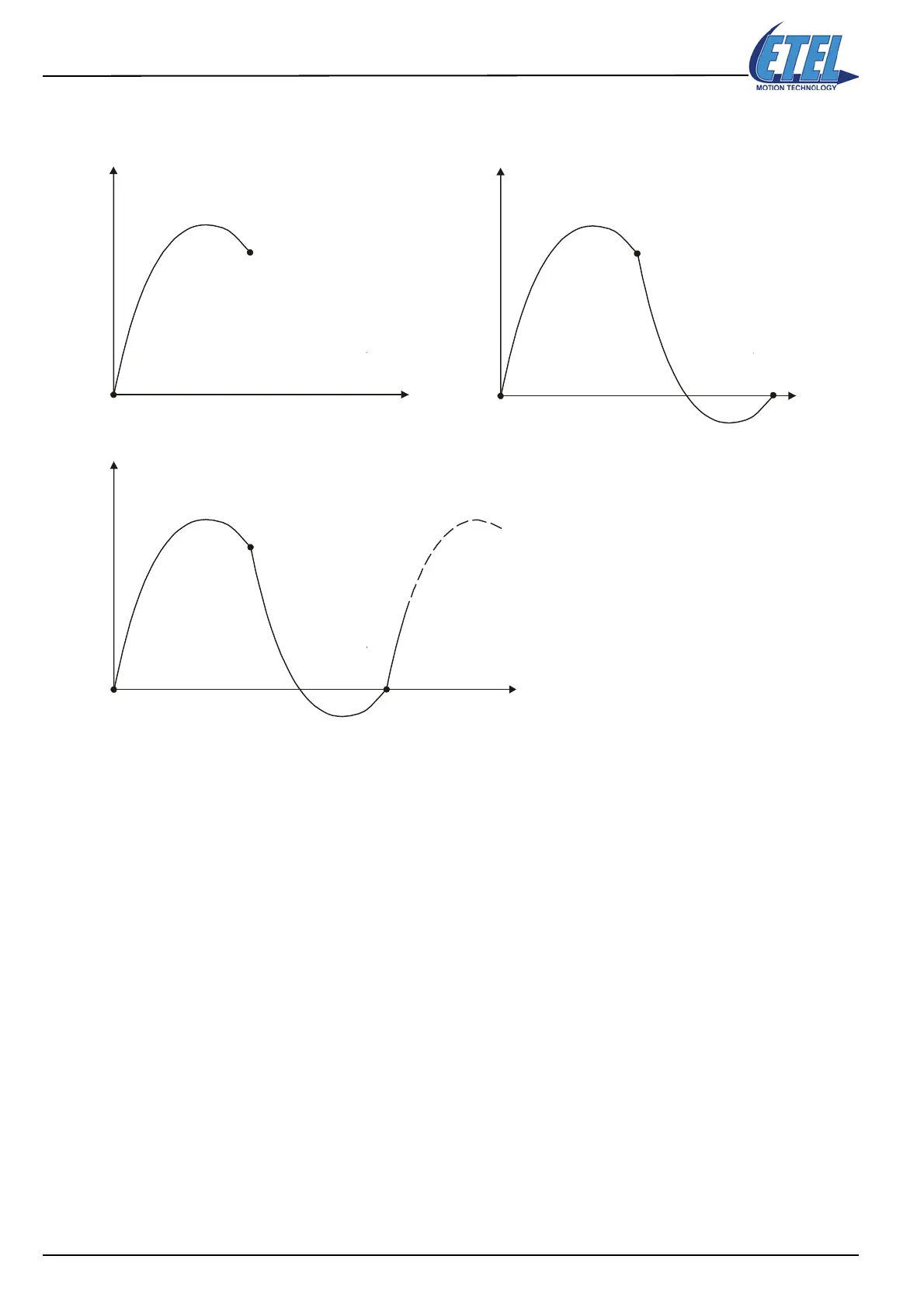
MMC.1=0 (LKT movement)
Position
Time
MMC.1=3 (LKT movement)
Position
Time
One back and forth movement
MMC.1=2 (LKT movement)
Position
Time
Infinite back and
forth movements

 Loading...
Loading...
