Operation & Software Manual
22
Direct Drives & Systems
Chapter A: Internal functioning & architecture ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
For specific applications, the user himself may
create the movement trajectory he wishes to
use. It can be a complex movement, with back
and forth movements, where the controller is
used as an electronic cam. Software tools are
available to help to create complex movements.
When a look-up table movement is required,
only select the table with the requested
movement and the total time of the movement
t
movement
with LTN and LTI commands
respectively. Then the POS command selects
the trajectory final point position x
final
and starts
the movement. If a long movement is requested
during a very short lapse of time, speed and
acceleration may attain very high values, that
can even exceed the capacity of the system.
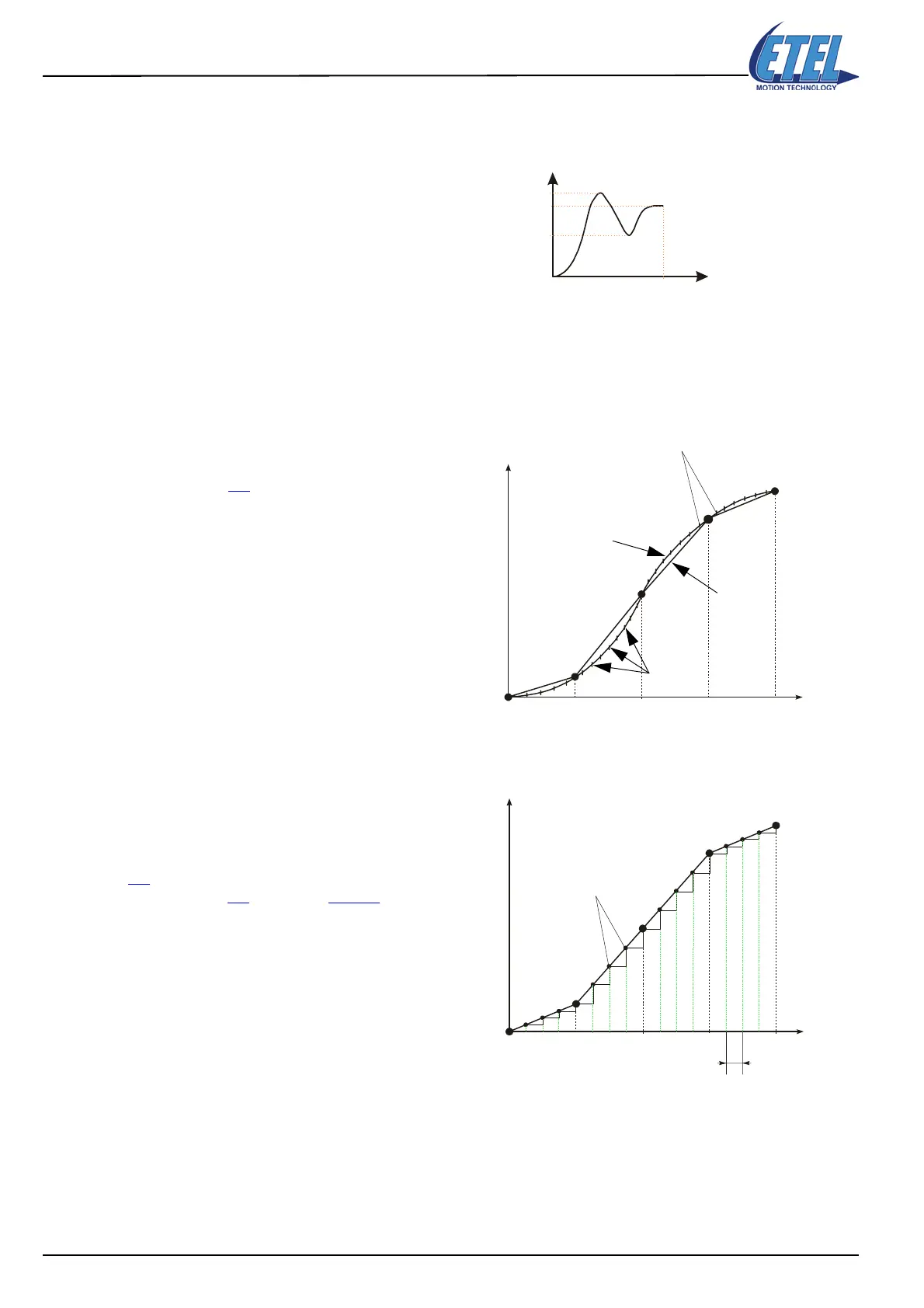
3.1.1.2 Look-up table movement
Each sti (refer to §4.
), the controller takes a point
of the look-up table. The point depends on the
value of the execution time (LTI) of the look-up
table. If this value should fall between two points
of the table, it will be linearly interpolated between
the two adjacent points of the table (1).
Then the points read by the controller in the table
are interpolated a second time (2) every fti (refer
to §4.
). The trajectory is thus made of segments
of a sti (refer to §4.
). Refer to §13.3.2 for more
information about the LKT.
Position
X
final
X
initial
t
movement
t
Example of complex movement
Position
(2)
41µs (fti)
Position
time
time
166,7 µs0 µs
333,3 µs
500 µs
666,7 µs
166,7 µs0 µs
333,3 µs
666,7 µs500 µs
(1)
Example with a DSC2P
Example with a DSC2P
Theoretical
trajectory
Trajectory
executed
by the controller
Points of
the LKT

 Loading...
Loading...
