ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05 Chapter B: System setup & tuning
Operation & Software Manual
Direct Drives & Systems 75
9.2.2.2 Feedforwards
During a movement, a permanent error may appear between the position reference and the motor's real
position. This drag can be due to mechanical frictions. It is possible to compensate it with the feedforward
parameters. These parameters will increase 'a-priori' (with anticipation, without reading the real drag) the speed
and acceleration command inputs to the state regulator. The feedforward parameters are:
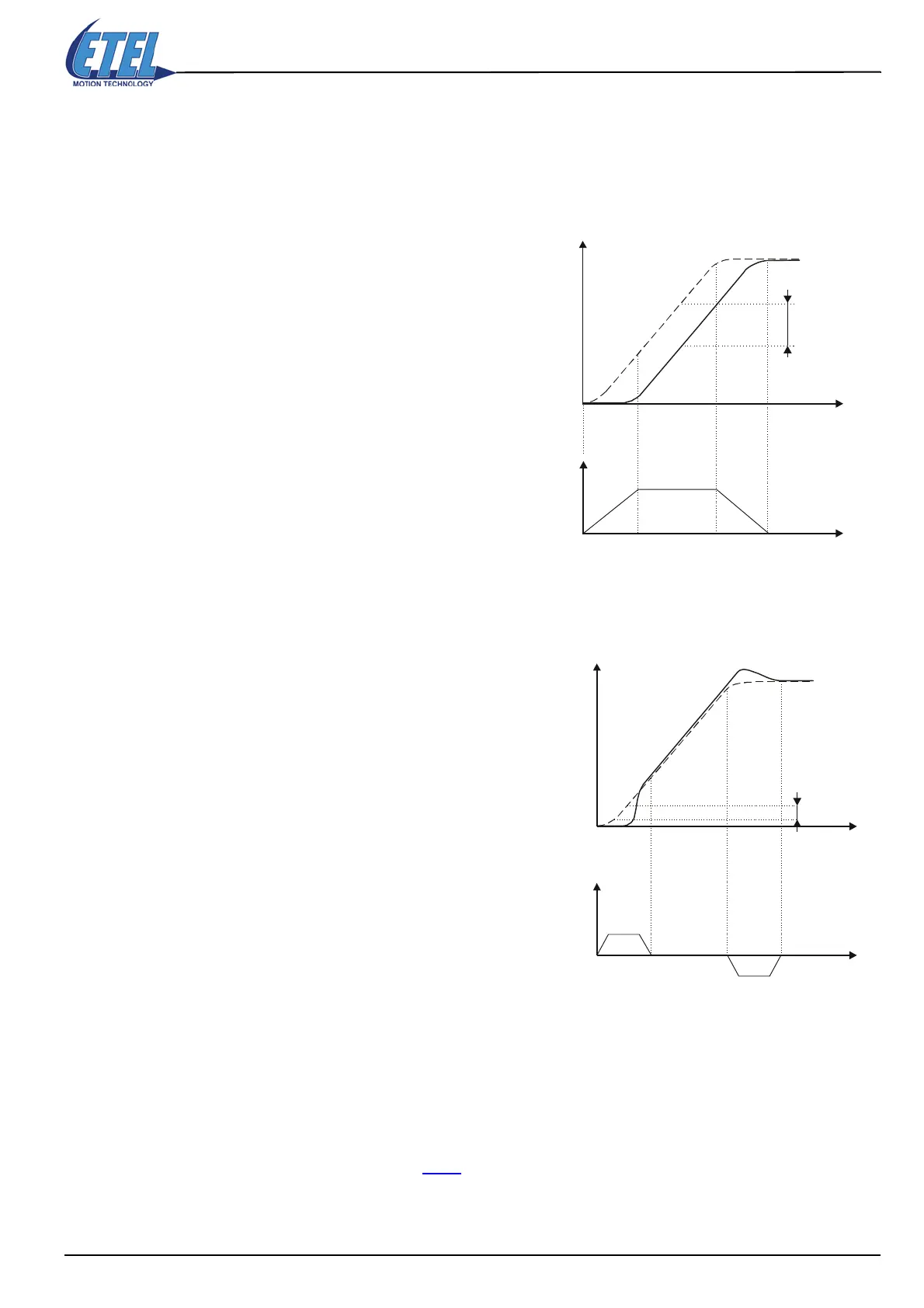
K20: Speed feedforward gain.
The difference between the position reference (Xc) and
the real position (X1) is similar to the speed's profile
(∆X1).
The speed feedforward will compensate the drag's
constant part. the value of parameter K20 value should
be set equal to the one of parameter K2.
K21: Acceleration feedforward gain.
The difference between the position reference (Xc) and
the real position (X2) is similar to the acceleration's
profile (∆X2).
The acceleration feedforward will compensate the
undershoot and overshoot remaining after the speed
feedforward compensation.
9.2.2.3 Speed filter
The speed feedback (input to K2) to the state regulator can be filtered. This speed filter is made up of 2 low-
pass 1st order filters, with a -20dB/decade slope each. The state regulator's speed filter parameter is:
K8: Speed filter (no filter when K8 = 0).
Should be used when an audible high frequency perturbation occurs on the speed (f > 700 Hz).
Remark: Advanced users may refer to §13.1
for a more complete regulation loop description.
Position
Mvt. reference Xc
X1 (K20 low, drag effect
Time
Xc - X1 = ∆X1
∆X1
Similar to
the speed
Time
Position
Mvt. reference Xc
X2 (K21 low, over
and undershoots)
Time
Xc - X2 = ∆X2
∆X2
Similar to the
acceleration
Time

 Loading...
Loading...
