4.2 Position control mode
47
4.2.2
Gain related to position control mode
Para
meter
Name Range
Default
value
Unit Usage
P009 First position loop gain 1~1000 40 1/s P
P021 Position loop feed forward gain 0~100 0 % P
P022
Position loop feedforward filtering time
constant
0.20~50.00 1.00 ms P
Since the position loop includes the speed loop, the load moment of inertia ratio is set
firstly, then the gain of the speed loop and the integral time constant of the speed loop are
adjusted, and finally the gain of the position loop is adjusted.
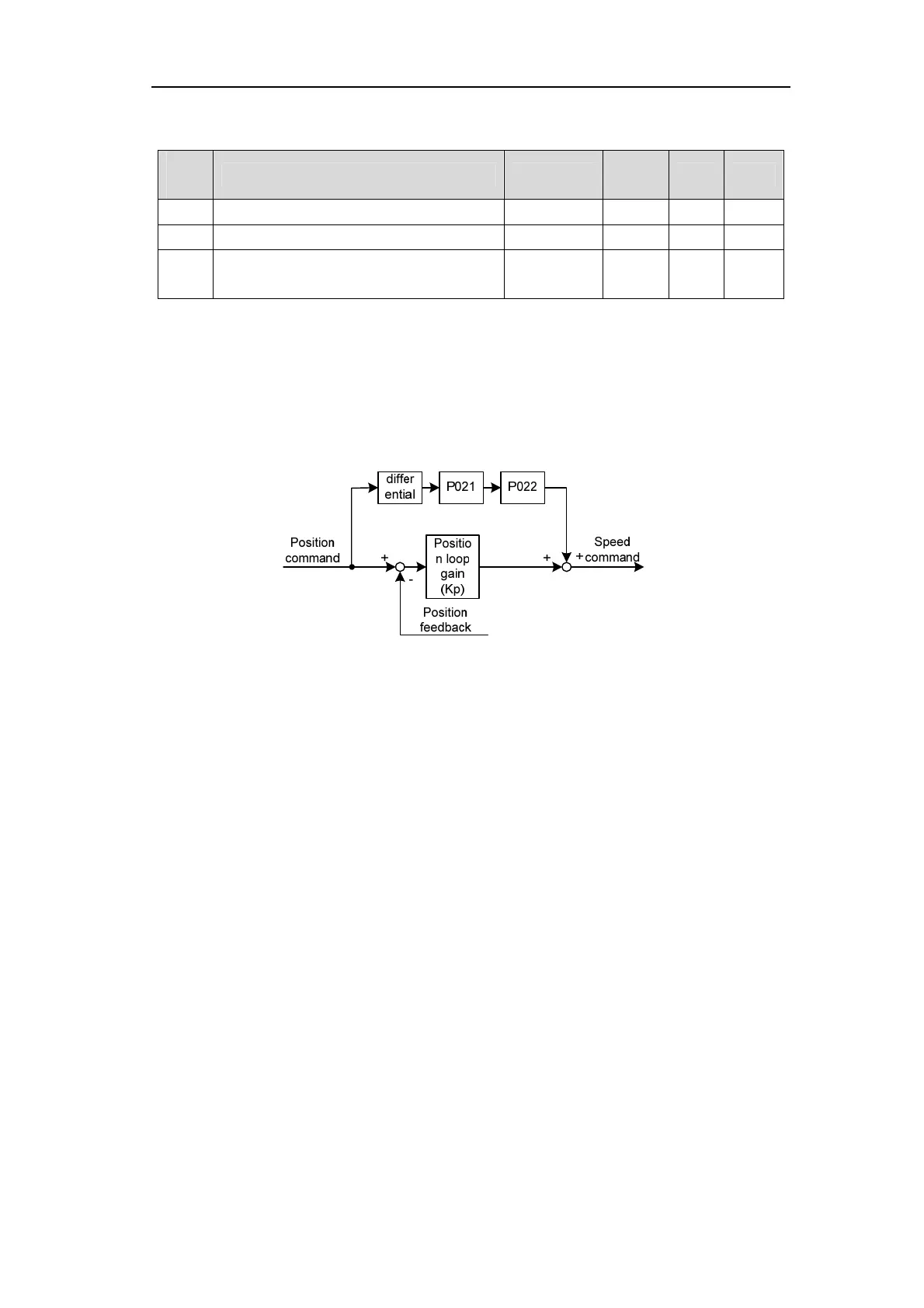
The following is the position controller of the system. The increase of the position loop
gain Kp can improve the position loop bandwidth, but it is limited by the speed loop
bandwidth. In order to increase the position loop gain, the velocity loop bandwidth must be
increased first.
The feedforward can reduce the phase lag of position loop control, reduce the position
tracking error and shorten the positioning time. With the increase of feedforward, the tracking
error of position control decreases, but too much will make the system unstable and overshoot.
If the electronic gear ratio is greater than 10, it is easy to produce noise. In general
applications, P021 can be set to 0%. If high response and low tracking error are needed, it can
be increased appropriately and should not exceed 80%. At the same time, the time constant of
position loop feedforward filtering (parameter P022) may need to be adjusted.