6.3 Operating mode
123
6.3.3
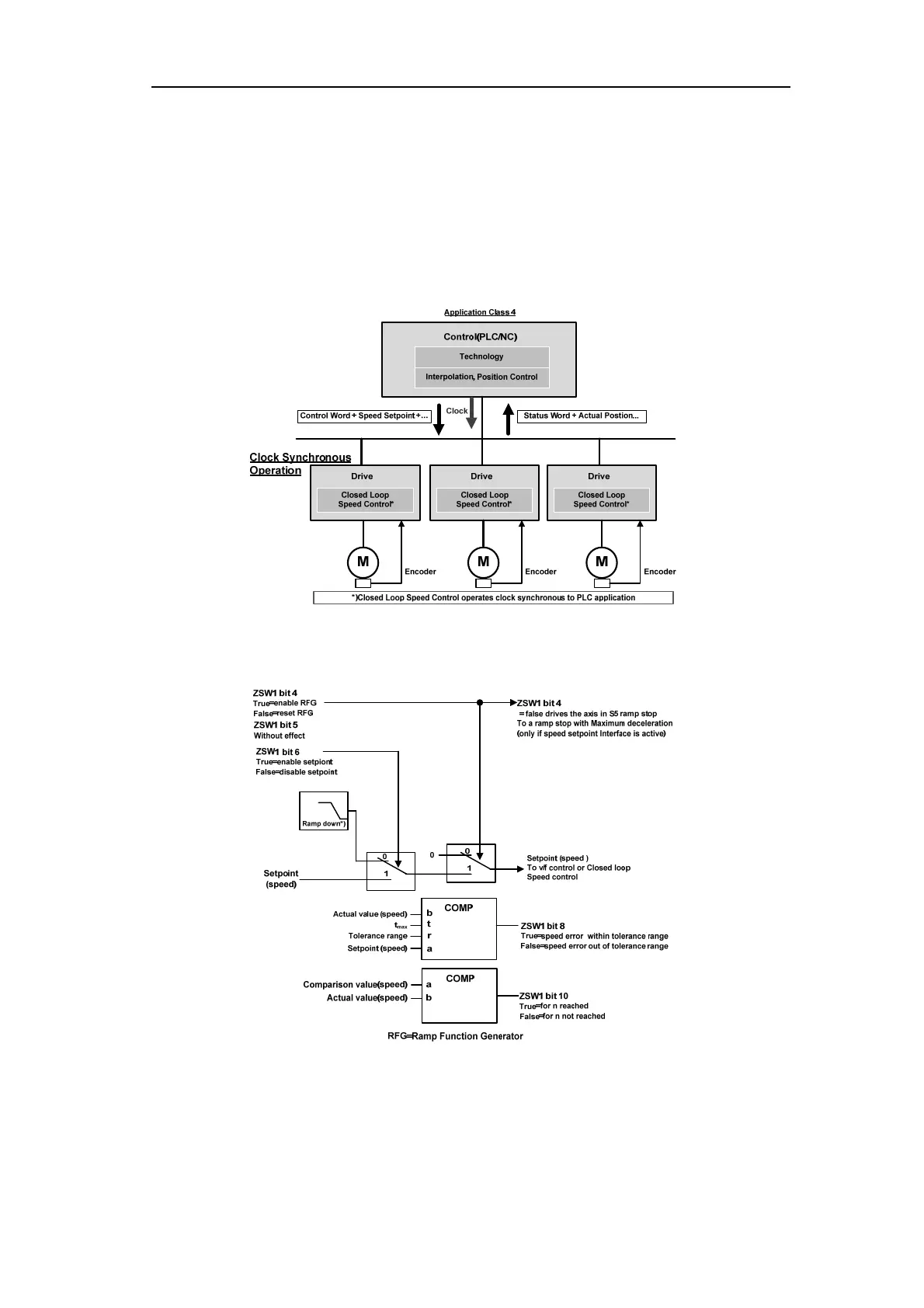
AC4: Motion control with central interpolation and speed
setting interface
Application class AC4(shown below) shows closed-loop position control through a
communication system. The speed set and actual values as well as the actual position values
are transmitted through a cyclic data exchange. The servo driver contains only closed-loop
speed control and actual position sampling algorithms. Because position is controlled through
the bus system, clock synchronization operations are necessary and should be precise.
Application class generally do not need the speed setting of the AC4 channel slope
function generator, the following chart from out of the station equipment the speed setting of
the simplified channel module function, to the speed set point STW1.5 channel has no effect.