7.3 Alarm cause and handling
135
7.3
Alarm cause and handling
In this manual, "☆" indicates the special function of the multi-circle absolute value code
disk, and "★" indicates the special function of the incremental code disk.
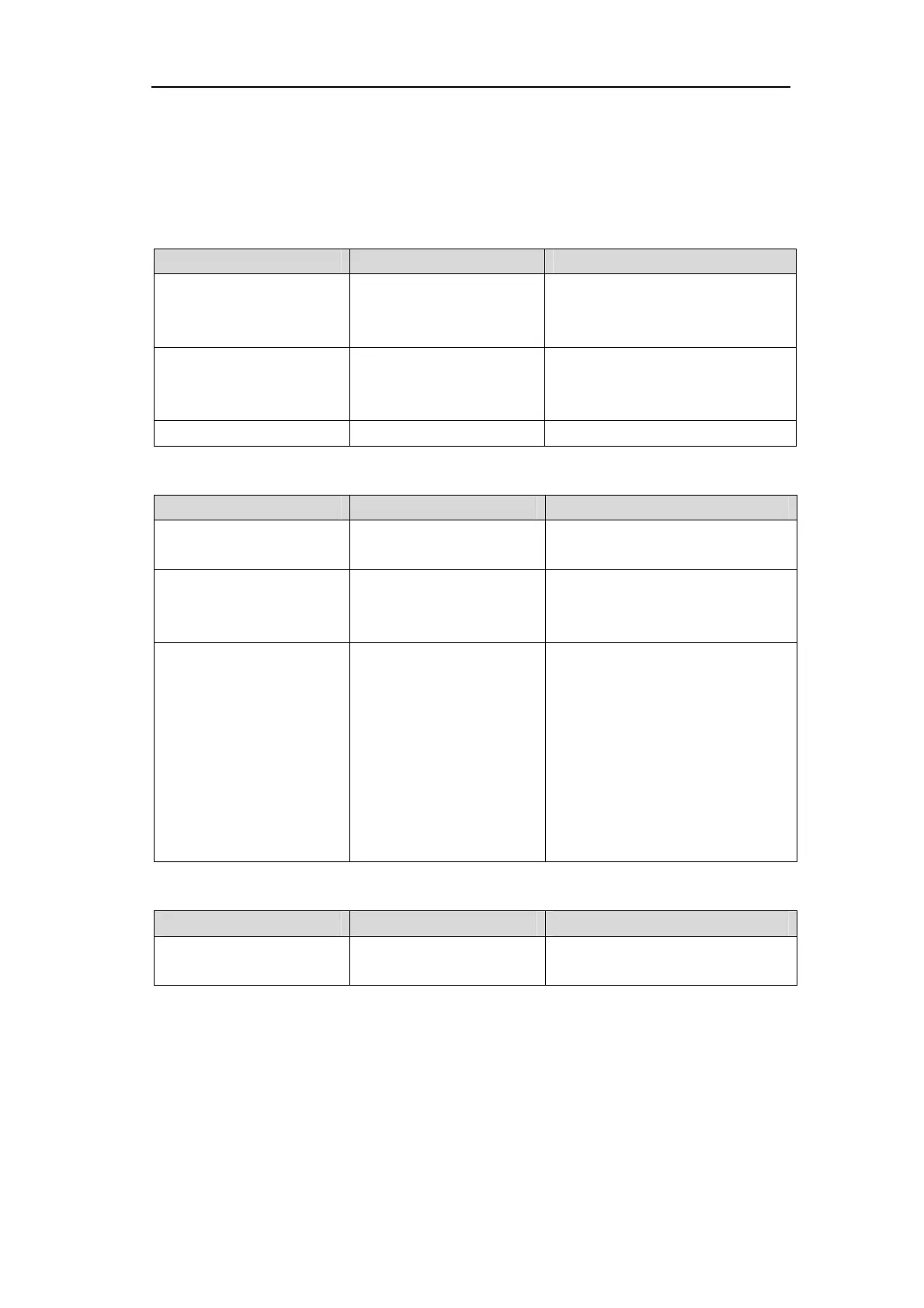
Err 1 (Over speed)
Potential cause Check Handle
Servomotor U 、 V 、 W
connection is not correct
Check U、V、W wiring
Correct U、V、W wiring. The U、V、W
must connect with servo driver terminal
U、V、W correspondently.
Speed overshoot
Check the operation status and
the parameters
Adjust servo gain to reduce the
overshoot; In speed control mode can
increase acceleration/deceleration time.
Encoder wiring error Check the encoder wiring Correct wiring.
Err 2 (Main circuit over-voltage)
Potential cause Check Handle
Input AC power is too high
Check the voltage of power
supply
Use correct power supply according with
the specifications.
Regeneration fault
Regenerative resistor and/or
IGBT damaged; Connection
circuit is open.
Repair.
Regeneration energy too large
Check the regeneration load
factor
Decrease the start-stop
frequency.
Increase acceleration /
deceleration time
Reduce the torque limit.
Reduce the load inertia.
Replace a bigger power servo driver
and servomotor
Replace a bigger brake resistor
Err 3 (Main circuit undervoltage)
Potential cause Check Handle
Input AC power is too low
Check the power supply
voltage
Make voltage conform to product
specification