8. Safety-related functions
MiR250 Hook Integrator Manual (en) 12/2023 - v.3.0 ©Copyright 2021–2023: Mobile Industrial Robots A/S. 113
predefined area around the robot.This area is called a Protective field. There are several
predefined Protective fields that increase in size as the robot drives faster. The robot stays in
Protective stop until the active Protective field is cleared of obstacles for at least two seconds.
The Personnel detection function makes the robot stop when the laser scanners detect an
obstacle wider than approximately 70mm within the active Protective field.
If the dynamic footprint and SICKconfiguration is enabled as described in "Enabling dynamic
footprint and SICK configuration" on page60, the Personnel detection function is no longer
considered reliable and the Protective fields listed in "Field switching and Personnel detection" on
the previous page no longer applies to the robot.
The Field switching function makes the robot switch between predefined Protective fields
according to the speed. The speed is determined from the robot’s motor encoders.
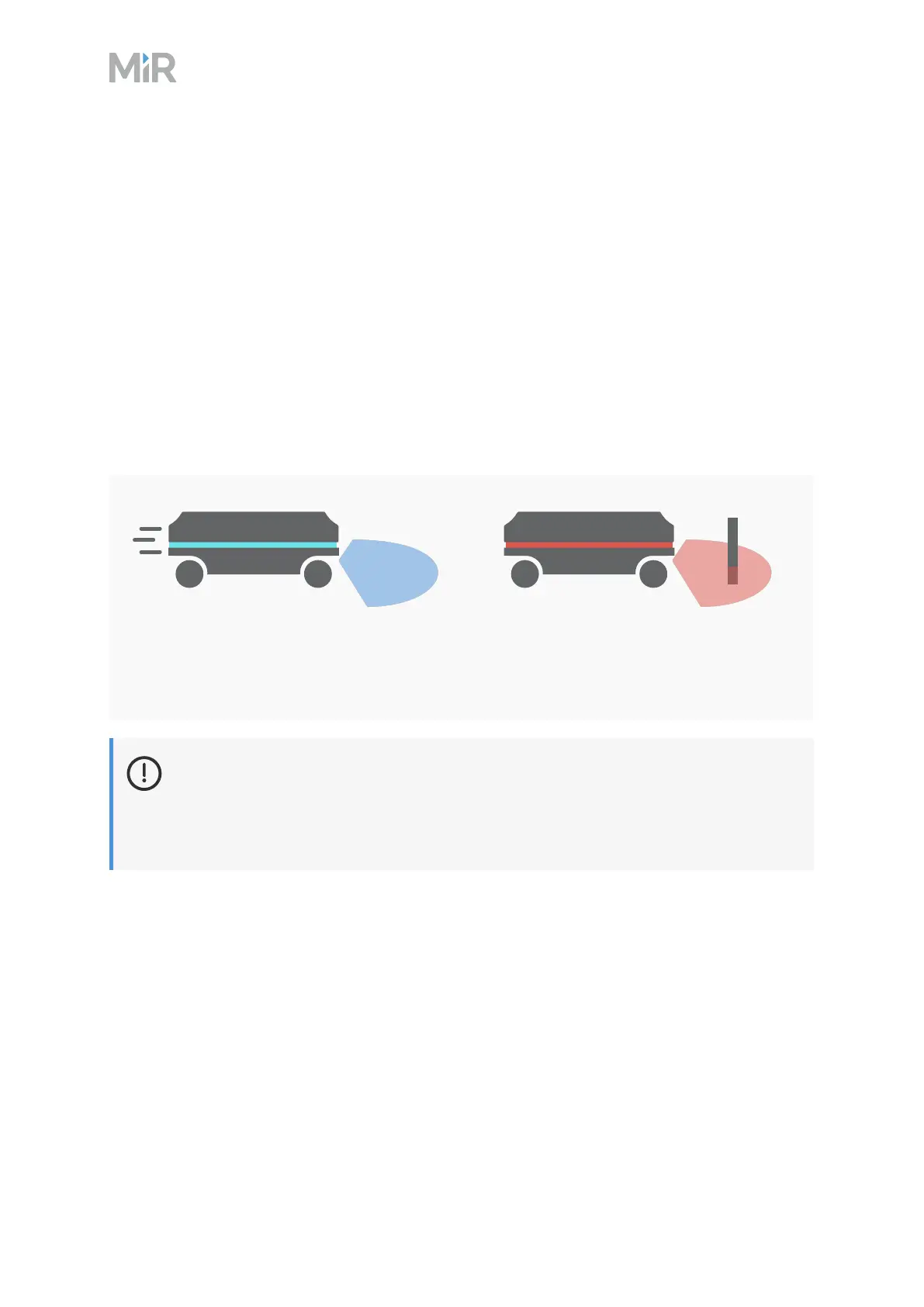
Clear ahead
The robot drives when the area is clear.
Obstacle detected
The robot stops when it detects an
obstacle.
NOTICE
Scanners measure distances to diffuse reflections, which means that a tolerance is
added to the Protective fields to secure a safe detection of persons crossing the
Protective fields. The tolerance distance is 65 mm.