M800S/M80/E80 Series Connection and Setup Manual
22 Setting the Position Detection System
458
IB-1501269-J
The zero point initialization is now complete. After initializing all axes, turn the power OFF and ON.
*1 If "#2059 zerbas = 0 (position where the axis was stopped in the stopper method (grid point immediately before
stopper = mechanical basic position))" is set, the condition will be as follows at the procedure (7):
State: [Complete], Machine end: 0.000, Machine position: Current machine position.
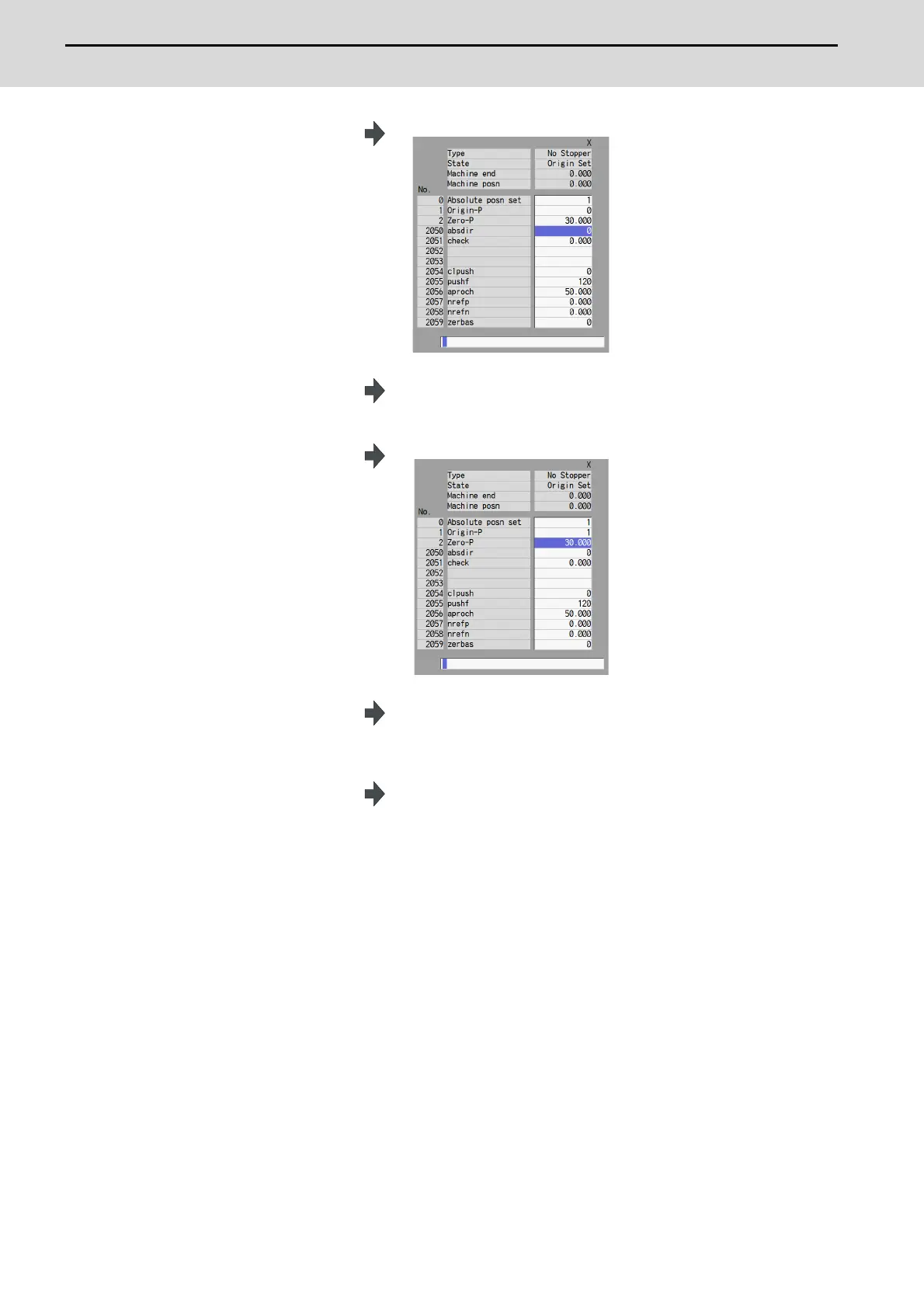
(6) Move the cursor to "Zero-P" with the
[ ↑ ] and [ ↓ ] keys.Enter the value in
the input area and press the [INPUT]
key. *2
The input value is registered in the "Zero-P" area.
(7) Move the axis toward the mechanical
basic position and align it to the
marked point.
State: [Origin set]
Machine position: Not passed -> Current machine position
(8) Move the cursor to "Origin-P" with
the [ ↑ ] and [ ↓ ] keys.
Input "1" in the input area and press
the [INPUT] key.
The input value is registered in the "Origin-P" area.
(9) Move the axis in the direction
designated with the absolute position
parameter "#2050 absdir".
State: [Ret. Ref. P.]
Machine end: Distance between the mechanical basic position and the
first grid point
Machine position: Current machine position
(10) The axis reaches the first grid point. The axis stops automatically.
State: [Complete]
Machine position: Current machine position

 Loading...
Loading...






