M800S/M80/E80 Series Connection and Setup Manual
24 Setting the Machine Error Compensation
504
IB-1501269-J
(1) Move the axis to positive or negative direction, then measure and record actual machine position of each division
point. Calculate compensation amount for each division point based on the actual machine position.
(*1) Compensation amount unit depends on the setting of the machine error compensation unit (parameter "#1006
mcmpunit").
(2) Set the calculated compensation amount to the parameter of compensation No. allocated to each division point.
[Compensation amount settings]
Setting pitch error compensation data
#4000
setting value
Calculation method of compensation amount (*1)
0
(Absolute amount
method)
Compensation amount = (Commanded machine position - Actual machine position) × 2
1
(Incremental
amount method)
Calculate compensation amount at the division point "n" when the position moved by "interval between
two division points" which was set to #4007. The calculation formula of the compensation amount differs
depending on whether the division point "n" is on positive side or negative side from the reference position.
[On the positive side]
Actual travel amount =
(Actual machine position of division point "n") - (Actual machine position of division point "n-1")
Compensation amount = (Interval between two division points - Actual travel amount) × 2
[On the negative side]
Actual travel amount =
(Actual machine position of division point "n") - (Actual machine position of division point "n+1")
Compensation amount = (Interval between two division points + Actual travel amount) × 2
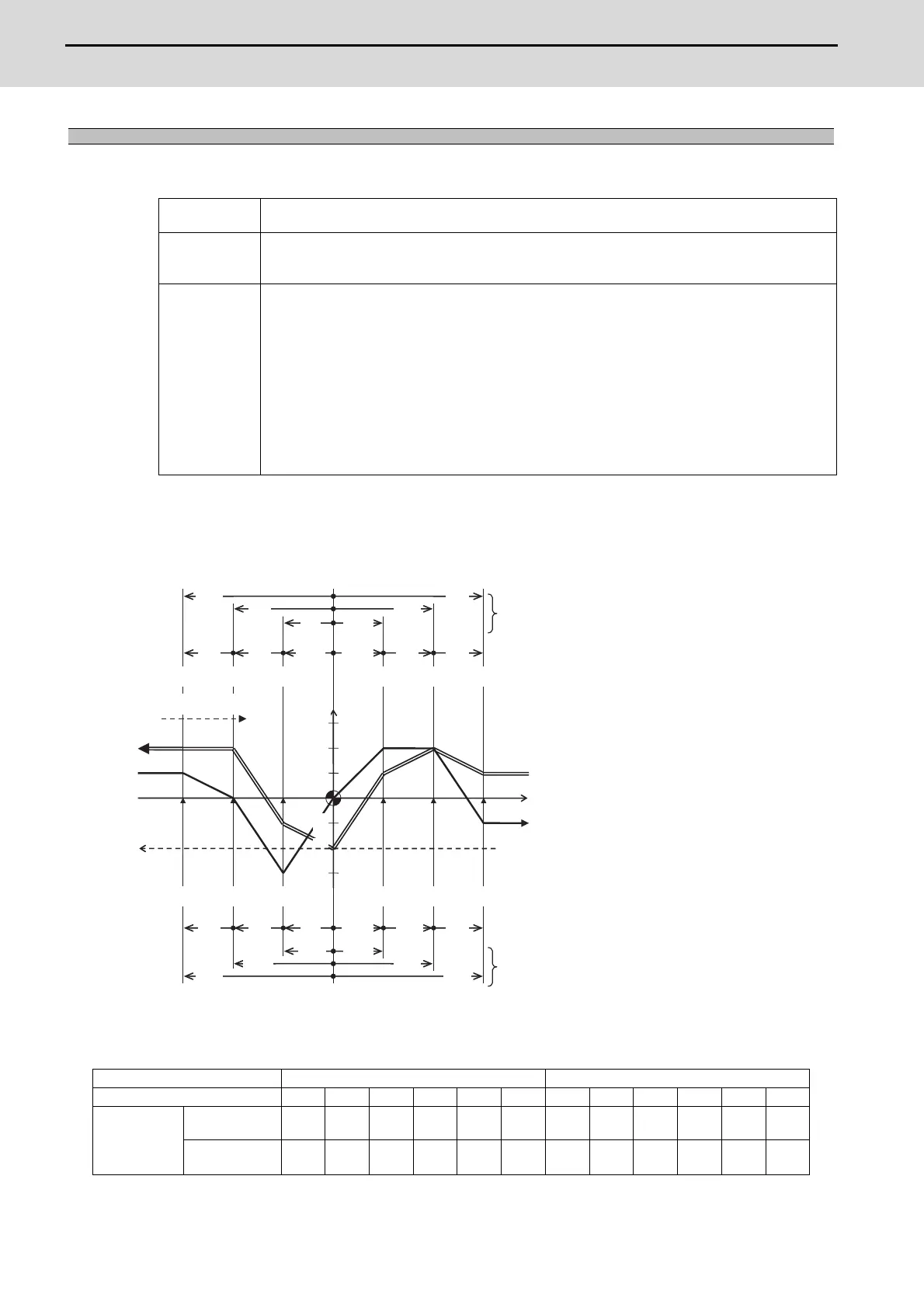
Movement direction Positive Negative
Compensation data No. #4101 #4102 #4103 #4104 #4105 #4106 #4107 #4108 #4109 #4110 #4111 #4112
Compensation
amount
Incremental
amount method
-2 0 6 -4-4 2 -8-8-2-6-8-6
Absolute
amount method
26-6-406062-6-22
#4101 #4103#4102
#4104 #4105 #4106
2
1
-1
-3
(1) (3) (-3) (-2) (0) (3)
(3)
(-2)
(0) (-2)
(-1) (1)
3
#4107 #4109#4108 #4110 #4111 #4112
-2
(0) (3) (1) (-3) (-1) (1)
(-4) (-4)
(-4) (-3)
(-1)
(-3)
Bidirectional pitch error (linear axis)
Error
Direction of reference
position return
Compensation amount in positive direction
(Absolute amount method)
Compensation amount in positive direction
(Incremental amount method)
Error amount in negative direction
Basic axis machine coordinate
Error amount in positive direction
Compensation amount in negative direction
(Incremental amount method)
Compensation amount in negative direction
(Absolute amount method)
Reference when the movement direction is negative

 Loading...
Loading...






