5 - 6
Chapter 5 Data Used for Positioning Control
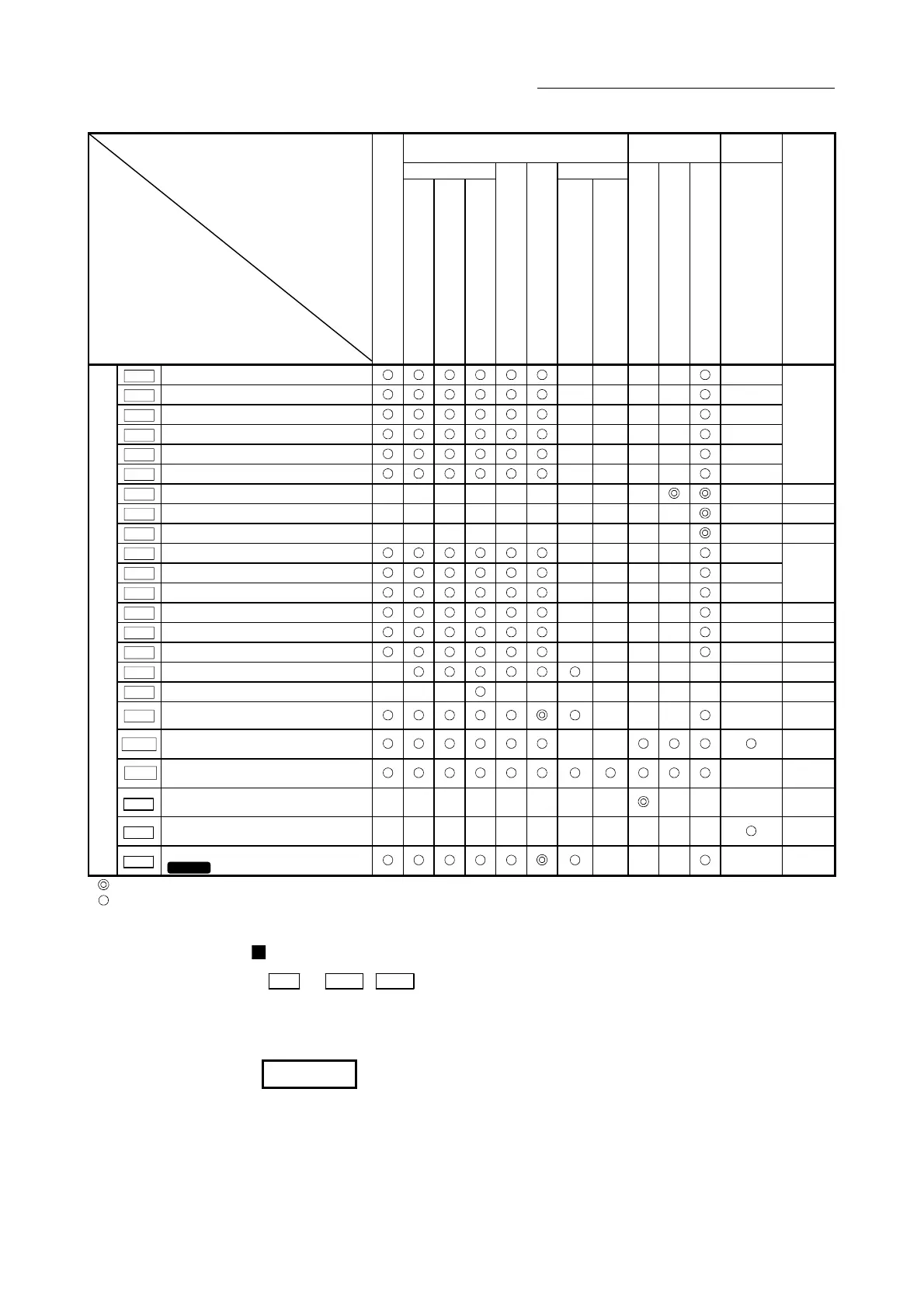
Major positioning control Manual control
Expansion
control
Position control Other control
Control
Positioning parameter
OPR control
1-axis linear control
2/3/4-axis linear interpolation control
1-axis fixed-feed control
2/3/4-axis fixed-feed control
2-axis circular interpolation control
1 to 4 axis speed control
Speed-position or position-speed control
Current value changing
JUMP instruction, NOP instruction,
LOOP to LEND
Manual pulse generator operation
Inching operation
JOG operation
Speed-torque control
Related sub function
Pr.25
Acceleration time 1
– – – –
–
Pr.26
Acceleration time 2
– – – –
–
Pr.27
Acceleration time 3
– – – –
–
Pr.28
Deceleration time 1
– – – –
–
Pr.29
Deceleration time 2
– – – –
–
Pr.30
Deceleration time 3
– – – –
–
13.7.6
Pr.31
JOG speed limit value – – – – – – – – –
– 13.4.1
Pr.32
JOG operation acceleration time selection – – – – – – – – – –
– –
Pr.33
JOG operation deceleration time selection – – – – – – – – – –
– –
Pr.34
Acceleration/deceleration process selection
– – – –
–
Pr.35
S-curve ratio
– – – –
–
Pr.36
Sudden stop deceleration time
– – – –
–
13.7. 6
Pr.37
Stop group 1 sudden stop selection
– – – –
– –
Pr.38
Stop group 2 sudden stop selection
– – – –
– –
Pr.39
Stop group 3 sudden stop selection
– – – –
– –
Pr.40
Positioning complete signal output time –
– – – – – –
Pr.41
Allowable circular interpolation error width – – –
– – – – – – – – –
Pr.42
External command function selection
– – –
–
13.5.1
13.7.2
Pr.83
Speed control 10 x multiplier setting for
degree axis
–
–
13.7.10
Pr.84
Restart allowable range when servo OFF
to ON
–
5.2.4
Pr.89
Manual pulse generator/Incremental
synchronous encoder input type selection
– – – – – – – –
– – –
5.2.4
Pr.90
Operation setting for speed-torque control
mode
– – – – – – – – – – –
12.1
Detailed parameters 2
Pr.95
External command signal selection
QD77MS16
– – –
–
–
: Always set
: Set as required ("–" when not set)
– : Setting not required (This is an irrelevant item, so the setting value will be ignored. If the value is the default value or within the setting range, there is no
problem.)
Checking the positioning parameters
Pr.1 to Pr.90 , Pr.95 are checked with the following timing.
•
When the "PLC READY signal [Y0]" output from the PLC CPU to the QD77MS
changes from OFF to ON.
•
When the positioning test of GX Works2 is executed.
REMARK
"High-level positioning control" is carried out in combination with the "major
positioning control".
Refer to the "major positioning control" parameter settings for details on the
parameters required for "high-level positioning control".

 Loading...
Loading...






