12 - 7
Chapter 12 Expansion Control
12.1.4 Operation of speed-torque control
[1] Switching of control mode (Speed control/Torque control)
Switching method of control mode
Set "1" in "
Cd.138 Control mode switching request" after setting the control mode in
"
Cd.139 Control mode setting" to switch to the speed control or torque control.
When the mode is switched to the speed control mode or torque control mode, the
control data used in each control mode must be set before setting "1" in "
Cd.138
Control mode switching request".
When the switching condition is satisfied at control mode switching request, "30:
Control mode switch" is set in "
Md.26 Axis operation status", and the BUSY signal
turns ON. "0" is automatically stored in "
Cd.138 Control mode switching request" by
QD77MS after completion of switching.
A warning "Control mode switching during BUSY" (warning code: 120) or "Control
mode switching during zero speed OFF" (warning code: 121) will occur if the
switching condition is not satisfied, and the control mode is not switched.
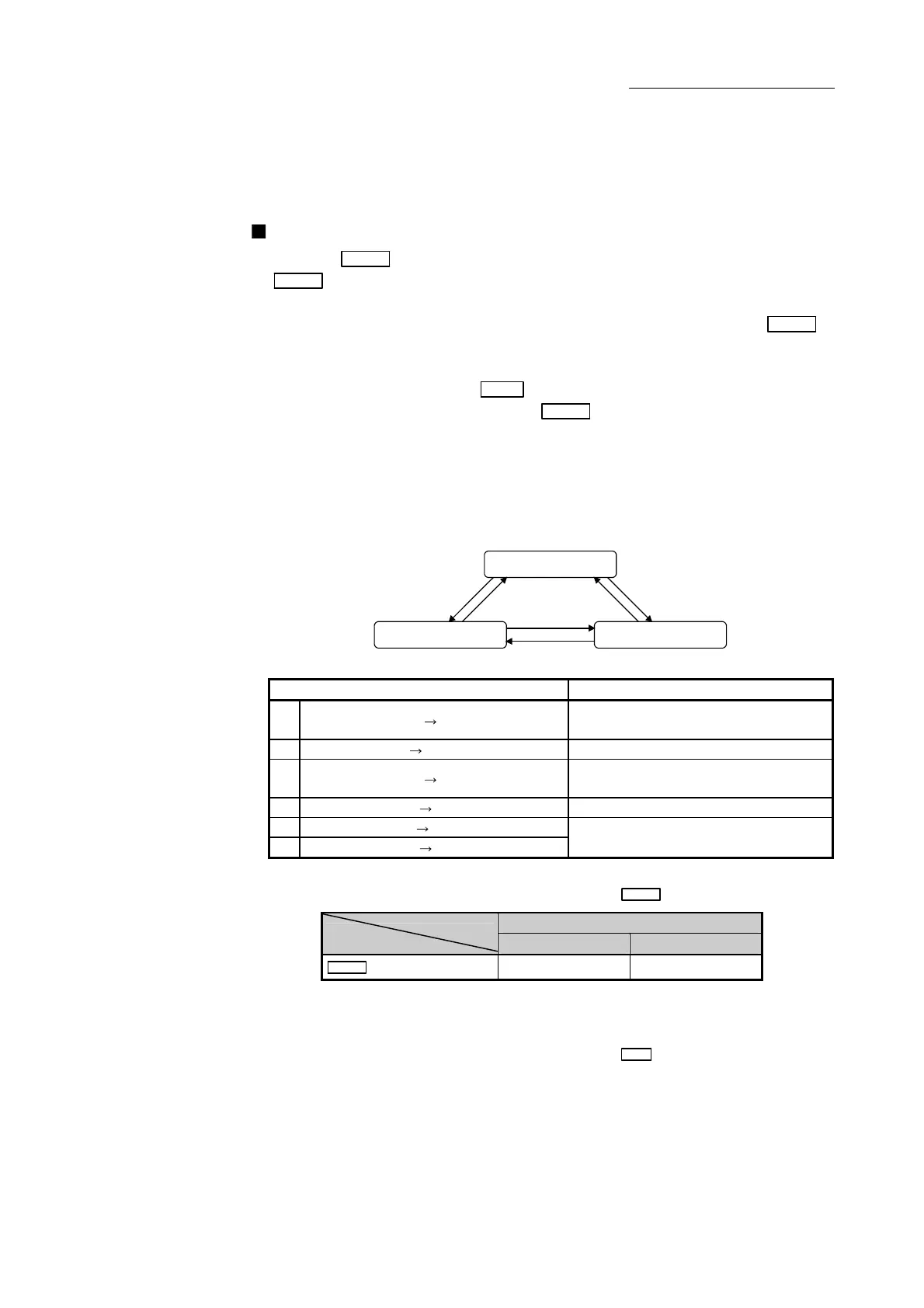
The following shows the switching condition of each control mode.
Position control mode
Speed control mode Torque control mode
3)4)2)1)
5)
6
Switching operation Switching condition
1) Position control mode Speed control mode
Not during positioning
(Note-1)
and during motor
stop
(Note-2)
, (Note-3)
2) Seed control mode Position control mode
During motor stop
(Note-2)
, (Note-3)
3) Position control mode Torque control mode
Not during positioning
(Note-1)
and during motor
stop
(Note-2), (Note-3)
4) Torque control mode Position control mode
During motor stop
(Note-2), (Note-3)
5) Speed control mode Torque control mode
6) Torque control mode Speed control mode
None
(Note-1): BUSY signal is OFF.
(Note-2): ZERO speed (Low-order buffer memory address: b3 of "
Md.108 Servo status") is ON.
Buffer memory address (Low-order)
QD77MS2/QD77MS4 QD77MS16
Md.108 Servo status: b3
876+100n 2476+100n
n: Axis No.-1
(Note-3): The control mode can be changed without checking the switching condition of "during motor
stop" in QD77MS by setting "1: Zero speed ON condition invalid (for switching control mode)" in
"Condition selection at mode switching (b12 to b15)" of "
Pr.90 Operation setting for speed-torque
control mode
". Set "1: Zero speed ON condition invalid (for switching control mode)" to switch the
control mode without waiting for stop of servomotor.

 Loading...
Loading...






