Appendix - 43
Appendices
Appendix 4 Comparisons with positioning modules /LD77MH
Appendix 4.1 Differences with QD75MH models
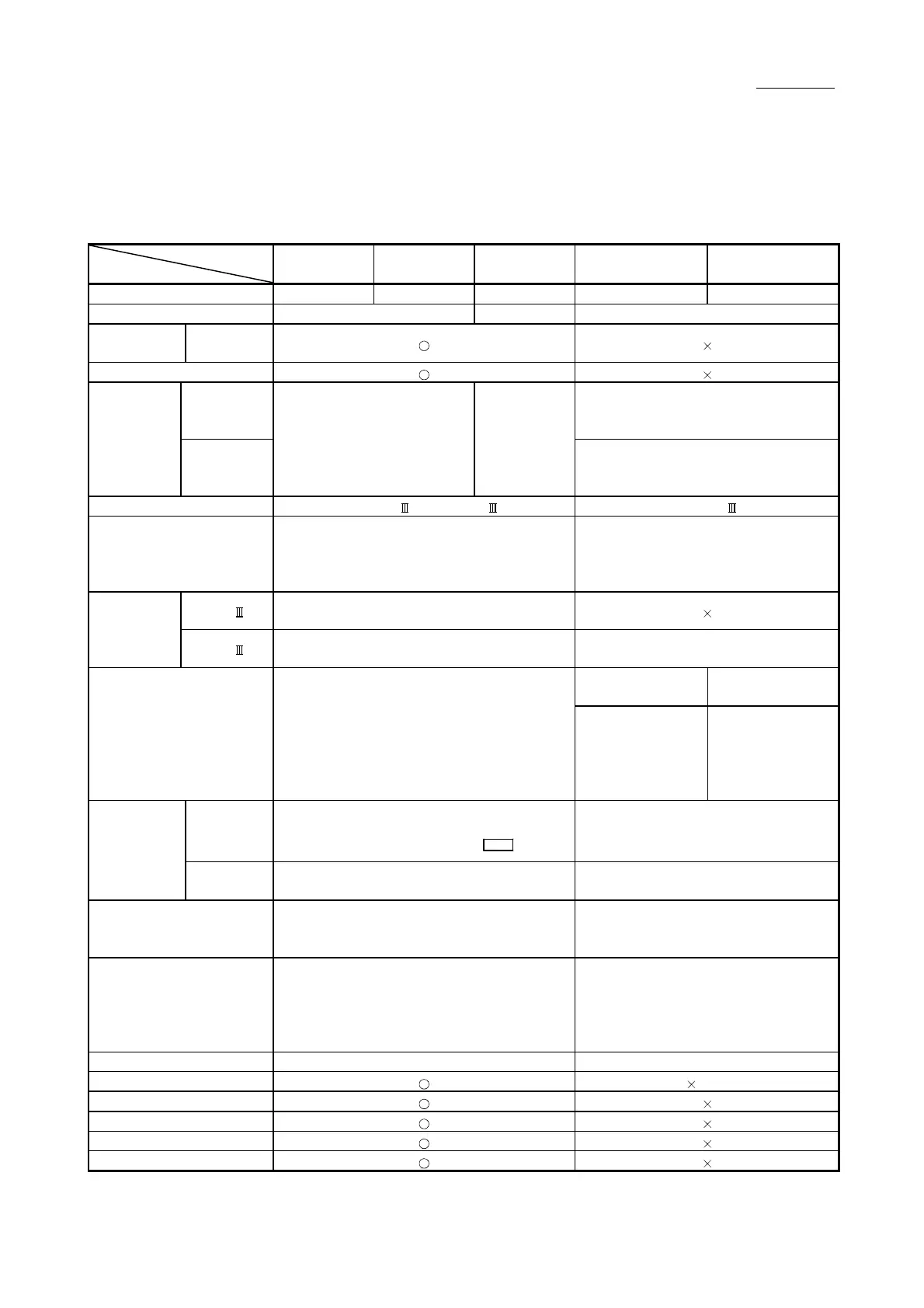
(1) Differences of performance specifications
Model
Item
QD77MS2 QD77MS4 QD77MS16 QD75MH2 QD75MH4
Number of control axes 2 4 16 2 4
Operation cycle [ms] 0.88 0.88/1.77 1.77
Control system
Speed-torque
control
Synchronous control
Trapezoidal
acceleration/
deceleration
3.5ms
Starting time
(1-axis linear)
S-curve
acceleration/
deceleration
0.88ms 1.77ms
4.0ms
SSCNET communication
SSCNET
/H or SSCNET
SSCNET
Compatible servo amplifier
MR-J4-B/MR-J4W-B/
MR-J3-B/MR-J3W-B/MR-J3-B-RJ006/
MR-J3-BS/MR-J3-B-RJ004/
MR-J3-B-RJ080W
MR-J3-B/MR-J3W-B/MR-J3-B-RJ006/
MR-J3-BS/MR-J3-B-RJ004/
MR-J3-B-RJ080W
(Note-1)
SSCNET
/H
PA, PB, PC, PD, PE, PS, PF, Po, PL
Controlled
servo
parameter
group
SSCNET
PA, PB, PC, PD, PE, PS, PF, Po PA, PB, PC, PD, PE, PS
1.77
Other than the
following
Monitor data refresh cycle [ms] Operation cycle
56.8
Machine feed value,
Feedrate,
Axis feedrate, External
input signal,
Forced stop input
Signal input
form
Set "differential-output type" or "voltage-output/open-
collector type" by parameter (
Pr.89 ).
Automatic recognition of "differential-output
type" or "voltage-output/open-collector type"
by hardware
Manual pulse
generator
1 pulse input
magnification
1 to 10000 1 to 1000
(Note-1)
Machine OPR function
(OPR method)
5 types
(Near-point dog method, Count method 1) 2), Data set
method, Scale origin signal detection method
)
4 types
(Near-point dog method, Count method 1) 2),
Data set method)
External signal selection function
External input signal of QD77MS
(FLS, RLS, DOG, STOP, DI) /
External input signal of servo amplifier
(FLS, RLS, DOG) / external input signal via CPU
(buffer memory : FLS, RLS, DOG)
External input signal of QD75MH
(FLS, RLS, DOG, STOP, CHG) /
external input signal of servo amplifier
(FLS, RLS, DOG)
Torque change function Forward/reverse same setting and individual setting Forward/reverse same setting only
(Note-1)
Amplifier-less operation function
(Note-1)
Virtual servo amplifier function
Mark detection function
Optional data monitor function
Module error collection function

 Loading...
Loading...






