12 - 33
Chapter 12 Expansion Control
Stop cause during continuous operation to torque control mode
The operation for stop cause during continuous operation to torque control mode is
shown below.
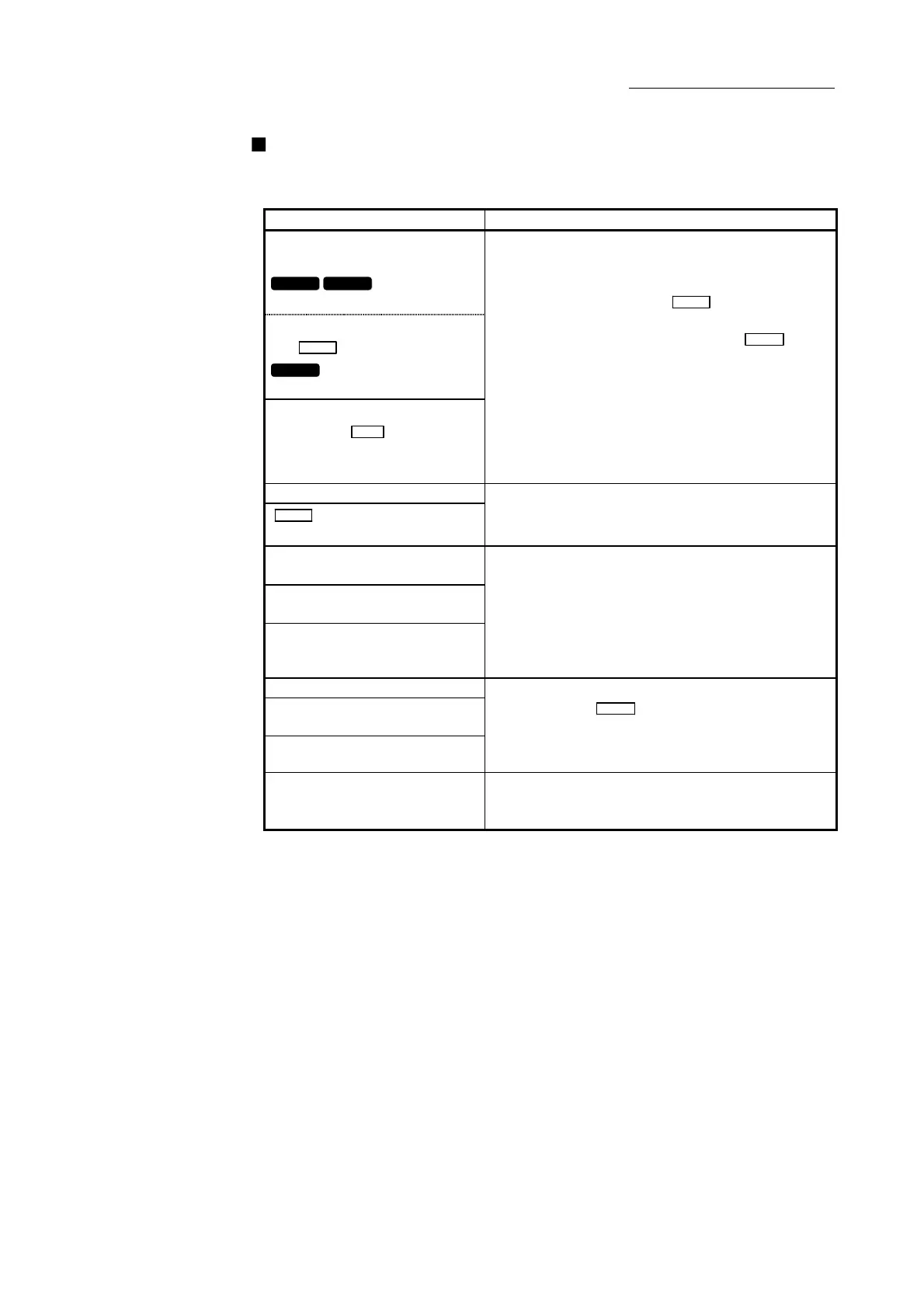
Item Operation during continuous operation to torque control mode
The Axis stop [Y4 to Y7] turned ON.
QD77MS2 QD77MS4
The " Cd.180 Axis stop" turned ON.
QD77MS16
Stop signal of " Cd.44 External input
signal operation device
" turned ON.
The speed limit value commanded to servo amplifier is "0"
regardless of the setting value of "
Cd.147 Speed limit value at
continuous operation to torque control mode
". The mode is switched
to position control mode when "Zero speed" of "
Md.108 Servo
status
" turns ON, and the operation stops immediately.
(Deceleration processing is not executed.)
The value of command torque is not changed. It might take time
to reach at the speed "0" depending on the current torque
command value.
The All axis servo ON [Y1] turned OFF.
" Cd.100 Servo OFF command" turned
ON.
The servo OFF is not executed during continuous operation to
torque control mode. The command status at that time becomes
valid at position control mode switching.
The current value reached to software
stroke limit.
The position of motor reached to
hardware stroke limit
The PLC READY [Y0] turned OFF.
The error (error code: 507, 508, 104, 105, 101) will occur. The
mode is switched to position control mode at current position,
and the operation immediately stops. (Deceleration processing
is not executed.) When the operation immediately stops, the
motor will start hunting depending on the motor speed.
Therefore, be sure not to reach to limit in high speed or do not
turn OFF the PLC READY.
The forced stop input to QD77MS.
The emergency stop input to servo
amplifier.
The servo error occurred.
The mode is switched to position control mode when the servo
OFF (Servo ON of "
Md.108 Servo status" turns OFF) is executed.
(While the servo amplifier is servo OFF, even if the mode is
switched to position control mode, the servomotor occurs to the
free run (The operation stops with dynamic brake).)
The servo amplifier's power supply
turned OFF.
The motor occurs to the free run (The operation stops with
dynamic brake.). (The mode is to position control mode at the
servo amplifier's power supply ON again.)

 Loading...
Loading...






