6 Applied Functions
6 - 16
OMNUC G5-series (Pulse-train Input Type) AC Servomotors and Servo Drives User’s Manual
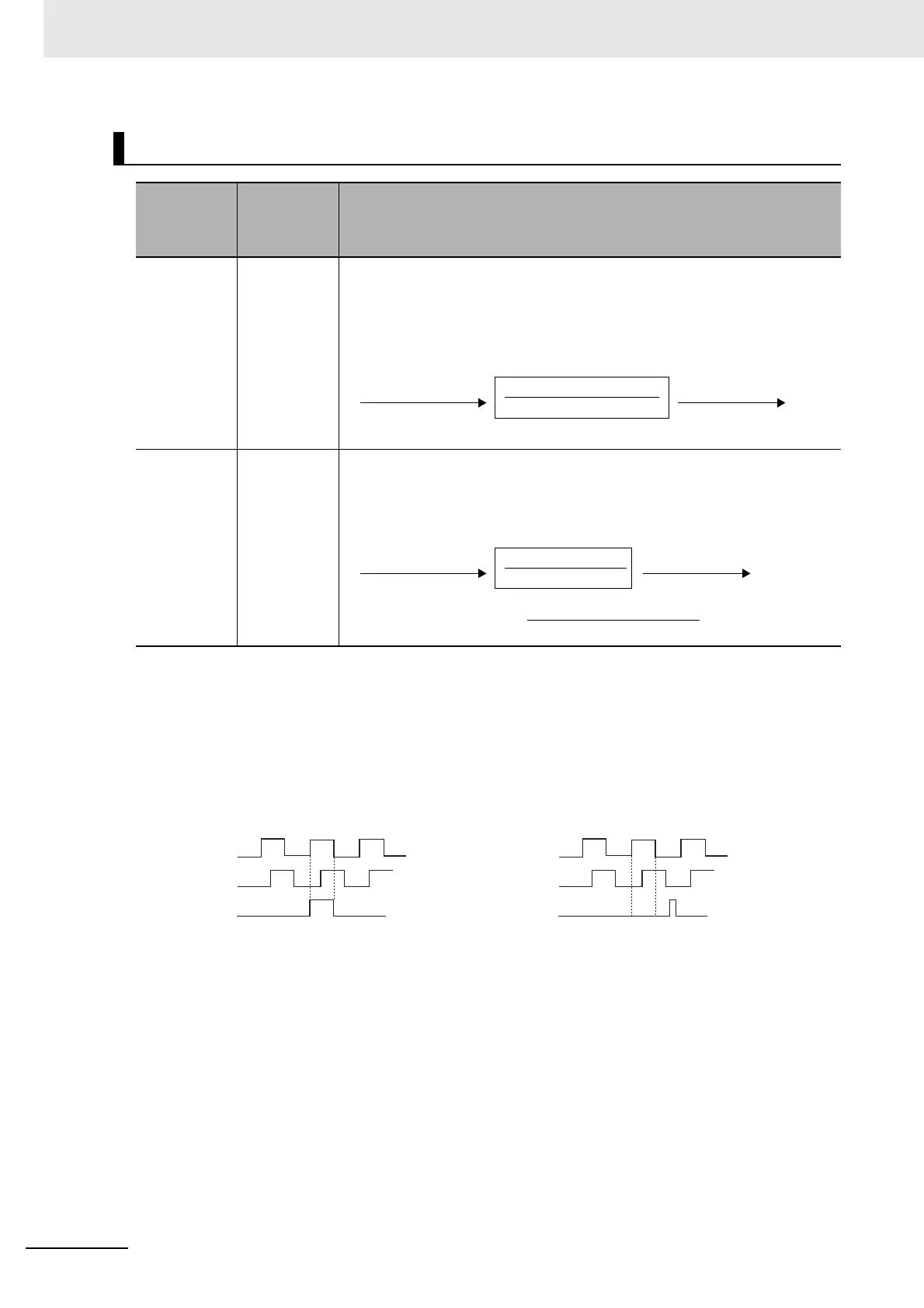
For the phase-Z signal, one pulse will be output per motor rotation. When Encoder Dividing
Denominator (Pn503) is not 0, the phase-Z signal will not be output in sync with the phase-A signal
unless the resolution of pulse output per rotation is a multiple of 4. In this case, the phase-Z signal will
be output at the encoder resolution and its width may be narrower.
Phase-Z Signal Output
Encoder Dividing Ratio Setting (Pn011 and Pn503)
Encoder
Dividing
Numerator
(Pn011)
Encoder
Dividing
Denominator
(Pn503)
Description
1 to 262,144 0 [Output source: Encoder]
When Encoder Dividing Denominator (Pn503) is 0:
The number of output pulses is calculated based on Encoder Dividing
Numerator (Pn011) as follows.
Number of output pulses per rotation = Encoder Dividing Numerator (Pn011) x 4
1 to 262,144 1 to
262,144
When Encoder Dividing Denominator (Pn503) is not 0:
The number of output pulses is calculated based on Encoder Dividing
Numerator (Pn011) and Encoder Dividing Denominator (Pn503) as follows.
When Pn011/Pn503 is an integer When Pn011/Pn503 is not an integer
Encoder pulses
[Pn011 set value] x 4
Encoder resolution
Output pulses
from Servo Drive
Encoder pulses
[Pn011 set value]
[Pn503 set value]
Output pulses
from Servo Drive
Number of output pulses per rotation =
Encoder Dividing Numerator (Pn011)
Encoder Dividing Denominator (Pn503)
x Encoder resolution
B
Z
Synchronization
B
Z
Asynchronous

 Loading...
Loading...





