7 - 15
7 Parameter Details
OMNUC G5-series (Pulse-train Input Type) AC Servomotors and Servo Drives User’s Manual
7-2 Gain Parameters
7
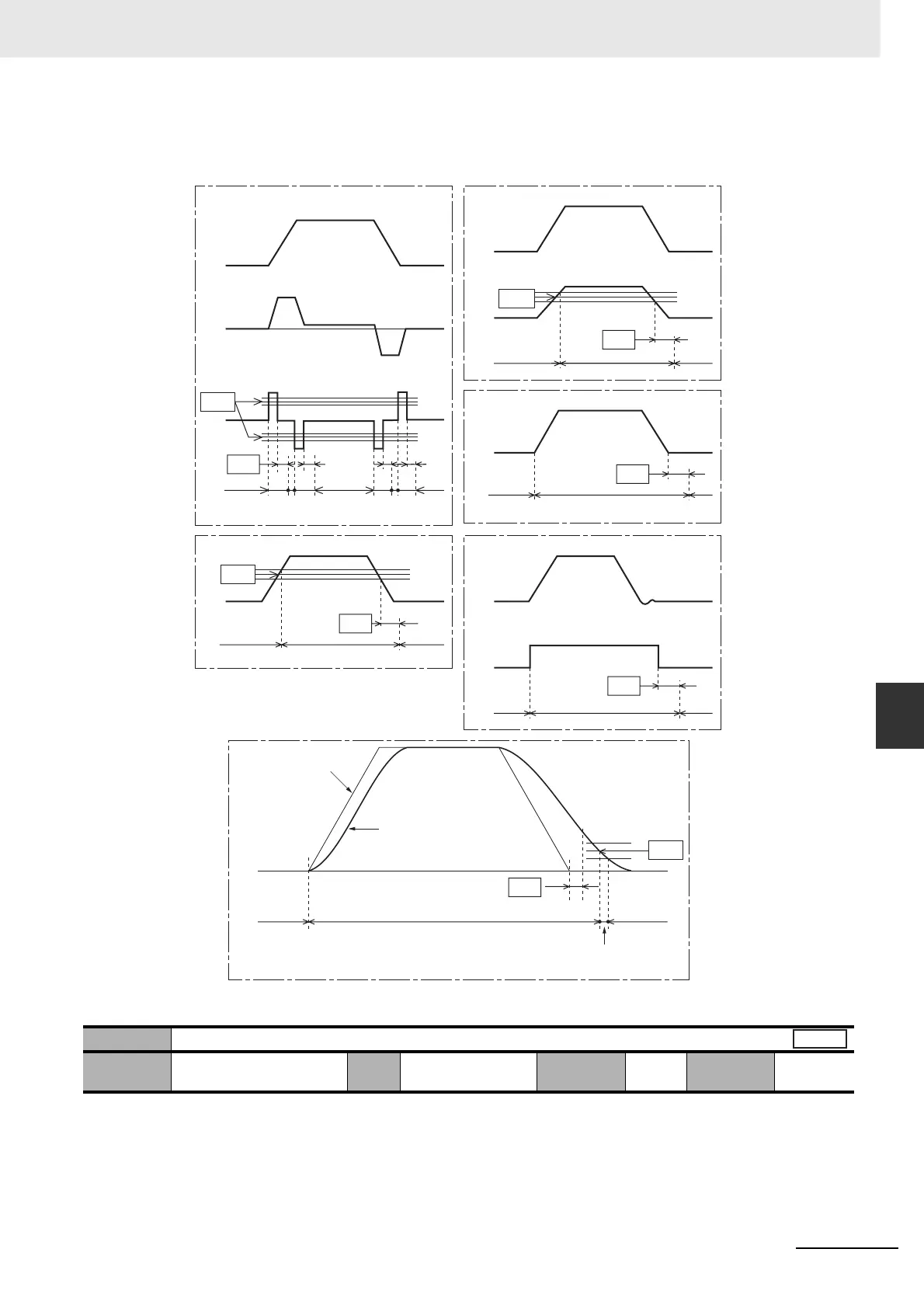
*5 When the set value is 10, the meanings of Gain Switching Delay Time in Position Control, Gain Switching Level
in Position Control, and Gain Switching Hysteresis in Position Control differ from the normal case. (Refer to
Figure F.)
• Set the delay time when returning from Gain 2 to Gain 1 if Switching Mode in Position Control
(Pn115) is set to 3 or 5 to 10.
Pn116
Gain Switching Delay Time in Position Control
Setting
range
0 to 10,000 Unit 0.1 ms Default
setting
50
Cycle the
power supply
–
H
L
H
L
H
L
H
L
Figure A
Speed V
Torque T
T
Time
1
1
22 22
1
1Gain 1
Figure C
Speed V
Gain 1 Gain 1Gain 2
Accumulated error pulse
Level
Time
Figure D
Command
speed S
Gain 1
Gain 1
Gain 2
Time
Figure E
Actual
speed N
INP
Gain 1 Gain 1Gain 2
Time
Figure B
Speed V
Gain 1 Gain 1Gain 2
Time
Command speed S
Gain 1 Gain 2
Actual speed N
Time
H
L
Gain 1
Gain 2 for speed loop integral time
constant only; Gain 1 for others
Figure E
Level
Level
Level
Position

 Loading...
Loading...





