7 - 37
7 Parameter Details
OMNUC G5-series (Pulse-train Input Type) AC Servomotors and Servo Drives User’s Manual
7-5 Interface Monitor Setting Parameters
7
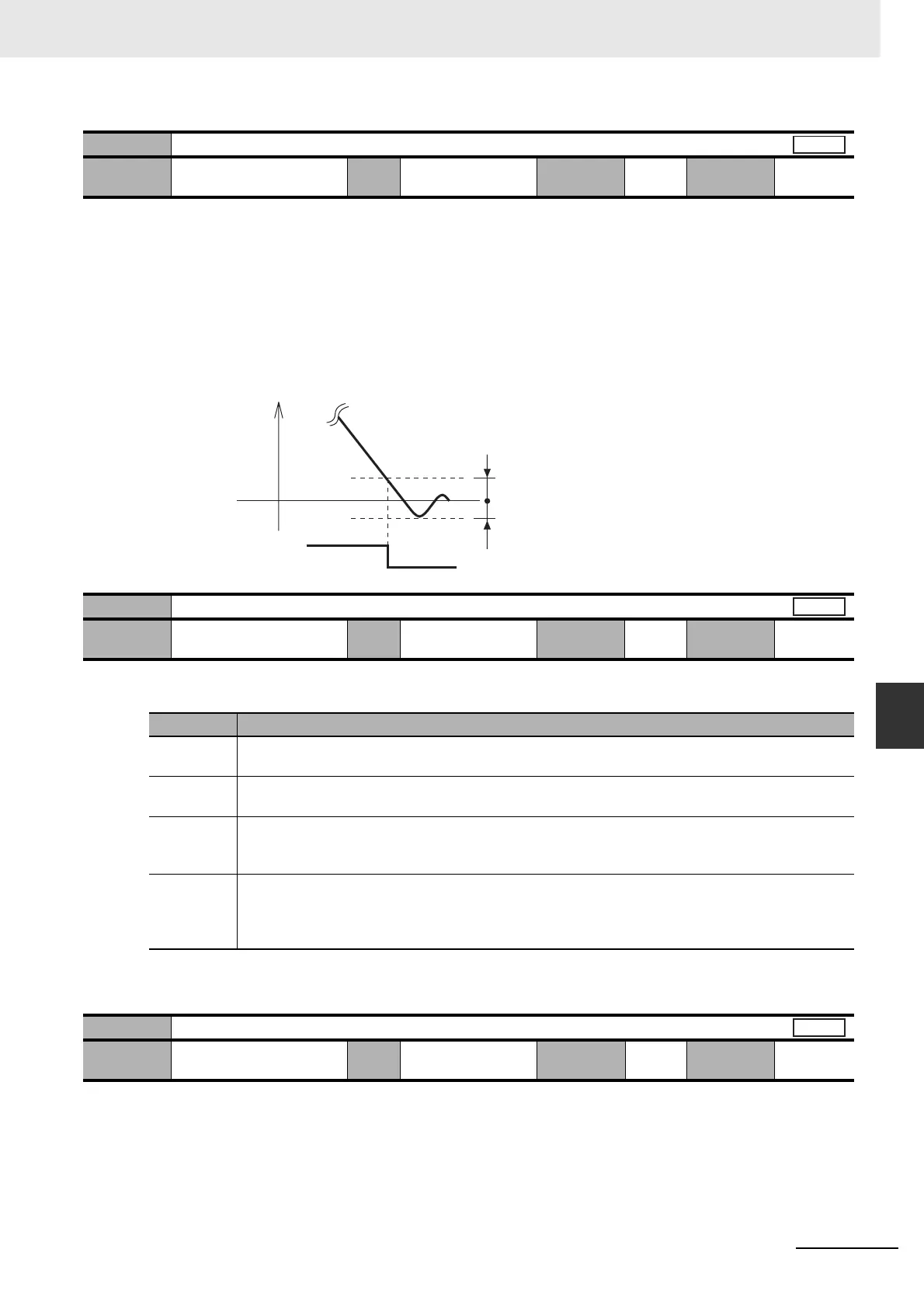
• Use this parameter in combination with Positioning Completion Condition Selection (Pn432) to set
the output timing of the positioning completion output. The positioning completion output (INP) will be
output if, after command pulse input, the Servomotor (workpiece) completes its movement and the
number of pulses in the error counter falls within the range defined as “±(set value).”
• Although the setting unit is command units, you can change it to encoder units in Position Setting Unit
Selection (Pn520). However, note that the unit for error counter overflow level is changed as well.
• If the parameter value is set too small, the time until the INP signal is output may increase or
chattering may appear in the output signal. Positioning Completion Range settings do not affect on
the final positioning accuracy.
Explanation of Set Values
• Use this parameter in combination with Positioning Completion Range 1 (Pn431) to set the behavior
of the positioning completion output (INP: CN1 pin 39).
• The positioning completion hold time is infinite when Pn433 is set to 0 and the ON status will be held
until the next position command is input.
Pn431
Positioning Completion Range 1
Setting
range
0 to 262,144 Unit Command units Default
setting
10
Cycle the
power supply
–
Pn432
Positioning Completion Condition Selection
Setting
range
0 to 3 Unit – Default
setting
0
Cycle the
power supply
–
Set value Description
0 The positioning completion output turns ON when the position error is equal to or less than
Positioning Completion Range 1 (Pn431).
1 The positioning completion output turns ON when there is no position command and the position
error is equal to or less than Positioning Completion Range 1 (Pn431).
2 The positioning completion output turns ON when there is no position command, the zero speed
detection signal is ON, and the position error is equal to or less than Positioning Completion Range
1 (Pn431).
3 The positioning completion output turns ON when there is no position command and the position
error is equal to or less than Positioning Completion Range 1 (Pn431). Then, the ON status is held
until the time set in Positioning Completion Hold Time (Pn433) expires and, after that, the ON/OFF
status is determined according to the position error status.
Pn433
Positioning Completion Hold Time
Setting
range
0 to 30,000 Unit 1 ms Default
setting
0
Cycle the
power supply
–
Position
INP
ccumulated
pulse
ON
Pn431
Pn431
Position
Position

 Loading...
Loading...





