7 Parameter Details
7 - 54
OMNUC G5-series (Pulse-train Input Type) AC Servomotors and Servo Drives User’s Manual
• For details about the display, refer to 8-4 Mode Setting on page 8-6.
• Do not set.
• Set the maximum command pulse input value. A Command Pulse Frequency Error (Alarm No. 27.0)
occurs if the command pulse input frequency exceeds this value x 1.2.
• The Servo Drive detects the Command Pulse Frequency Error for pulses it has accepted. Therefore,
if may not detect the error if the number of input pulses is much larger than the value set in this
parameter. In addition, setting the value to 1,000 or less enables the use of the digital filter for the
command pulse input as shown in the table below.
Explanation of Set Values
• Set whether to enable or disable the detection of the Pulse Regeneration Error (Alarm No. 28.0).
Explanation of Set Values
• Set whether or not to restrict operations on the front panel.
• The restricted operation varies depending on the mode as shown in the table below.
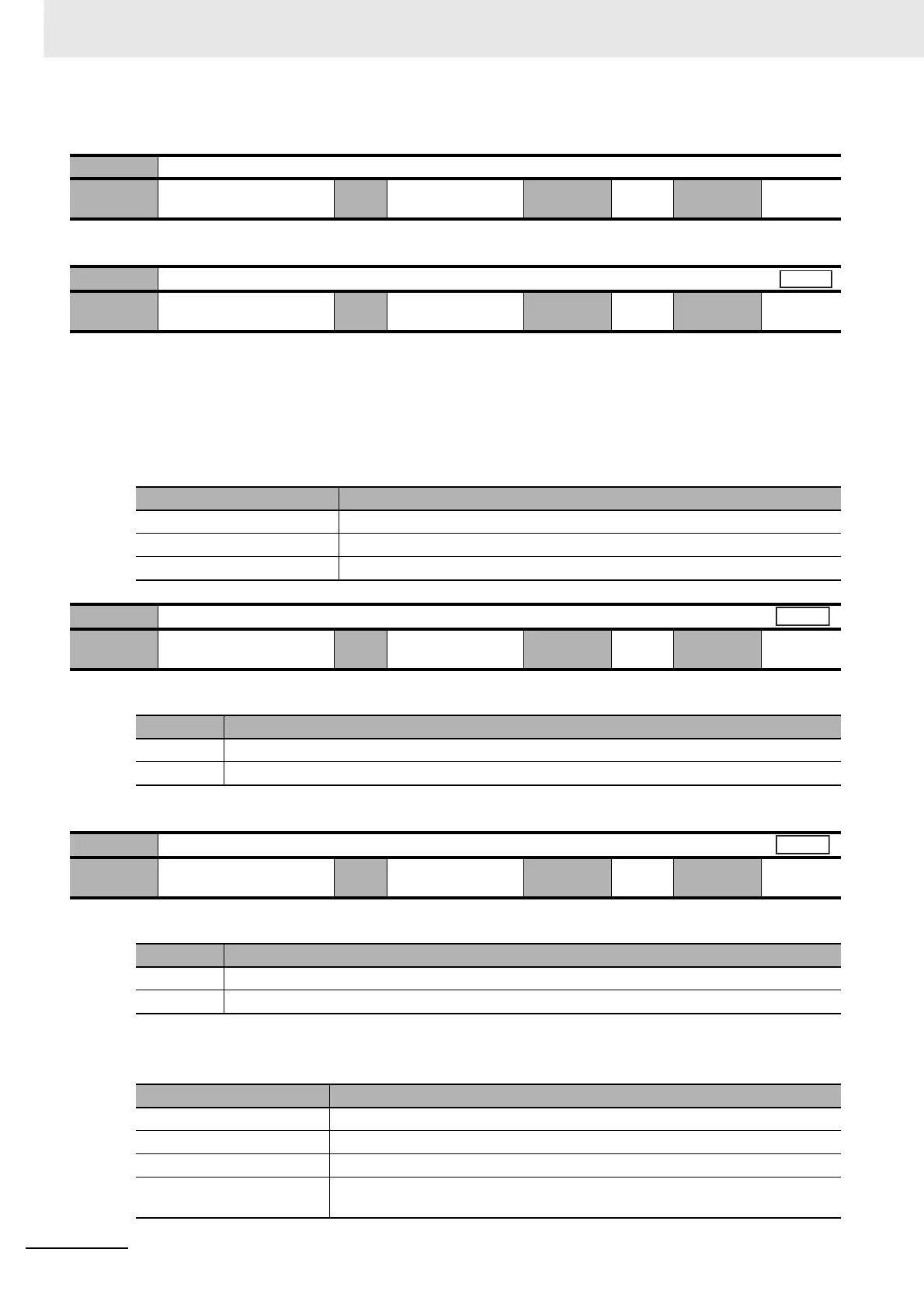
Pn531 Reserved
Setting
range
1 Unit – Default
setting
1
Cycle the
power supply
–
Pn532
Command Pulse Input Maximum Setting
Setting
range
250 to 4,000 Unit Kpps Default
setting
4,000
Cycle the
power supply
Required
Pn532 set value Digital filter
250 to 499 200 ns × 2 readings
500 to 999 100 ns × 2 readings
1,000 to 4,000 None (through)
Pn533
Pulse Regeneration Output Limit Setting
Setting
range
0 to 1 Unit – Default
setting
0
Cycle the
power supply
Required
Set value Description
0 Error detection disabled
1 Error detection enabled
Pn535
Front Key Protection Setting
Setting
range
0 to 1 Unit – Default
setting
0
Cycle the
power supply
Required
Set value Description
0 Front panel operation not restricted
1 Front panel operation restricted
Mode Operations restricted
Monitor Mode All monitor data can be viewed.
Parameter Setting Mode Parameters cannot be changed. However, set parameter values can be viewed.
EEPROM Write Mode Unavailable (Not displayed)
Ancillary Function Mode Operations other than disabling the front key protection setting are unavailable
(not displayed).
Position
All
All

 Loading...
Loading...





