9 Adjustment Functions
9 - 16
OMNUC G5-series (Pulse-train Input Type) AC Servomotors and Servo Drives User’s Manual
Speed Loop Gain (Pn101, Pn106)
The speed loop gain determines the responsiveness of a Servo Drive.
When Inertia Ratio 1 (Pn004) is set correctly, the values set in these parameters are the response
frequency.
Increasing the value of the speed loop gain improves the responsiveness and quickens positioning,
but vibration is more likely to occur. Adjustment must be made so that vibration does not occur.
This parameter is related to Speed Loop Integral Time Constant (Pn102), so it is possible to
increase the speed loop gain by increasing the integral time constant.
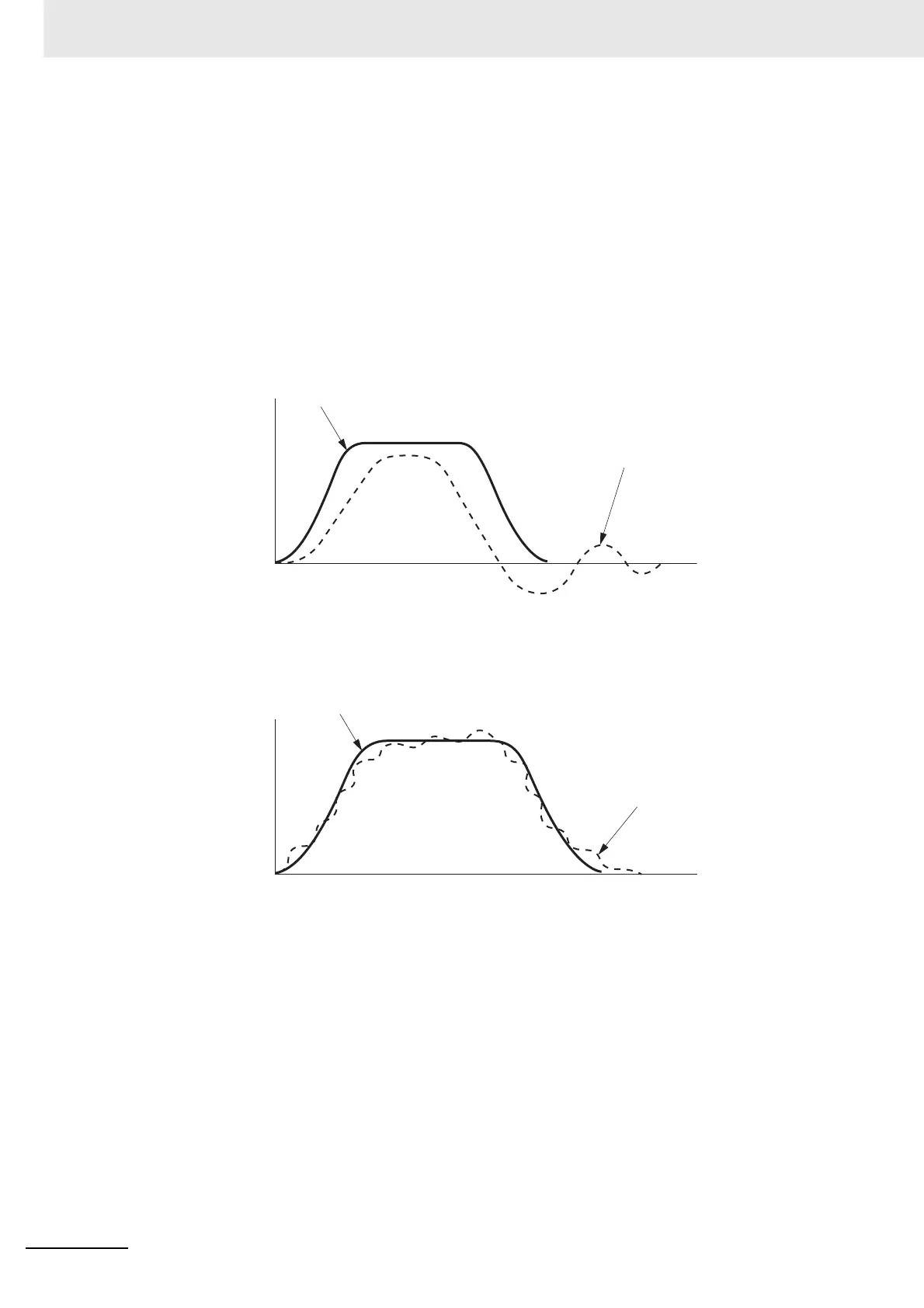
• If the speed loop gain is low, the speed response becomes slow and a large overshooting occurs.
In such case, increase the speed loop gain.
• If the speed loop gain is high, vibrations are more likely to occur. Vibration or resonance may not
disappear.
In such case, decrease the speed loop gain.
Actual operation
Command operation pattern
Speed
[r/min]
Time t
Actual operation
Command operation pattern
Speed
[r/min]
Time t

 Loading...
Loading...





