9 - 15
9 Adjustment Functions
OMNUC G5-series (Pulse-train Input Type) AC Servomotors and Servo Drives User’s Manual
9-3 Manual Tuning
9
9-3-1 Basic Settings
Inertia Guideline
Position Loop Gain (Pn100, 105)
This loop controls the number of pulses from encoder to be the designated number of pulses.
This is called an error counter, and when the pulse is equal to or lower than the specified value,
positioning is completed and the signal is output. The ratio of set maximum speed and error counter
is called a position loop gain.
For the position loop gain, set the inverse of the value set in Speed Loop Integral Time Constant
(Pn102) as a guide. This is 10 [1/s] when Pn102 is set to 100 ms.
With this setting, overshooting never occurs. For quicker positioning, increase the position loop gain
value. Note that setting a excessively large results in overshooting or vibration. If this occurs,
decrease the set value.
If the speed loop or the current loop is the cause of vibration, adjusting the position loop is not a
solution for eliminating vibration.
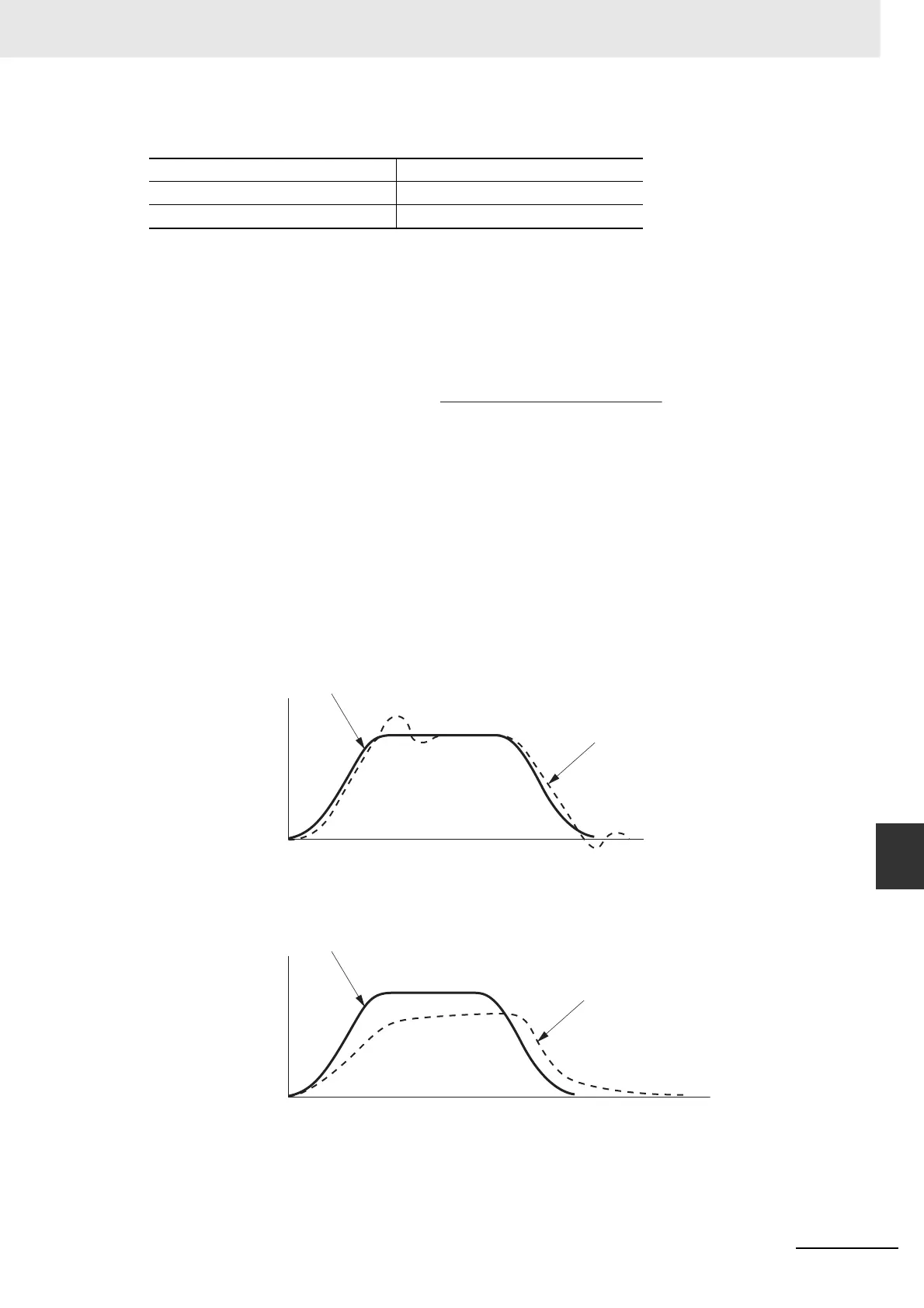
Response to the position loop gain adjustment is as shown below.
• If the position loop gain is high, overshooting occurs.
• If the position loop gain is low, positioning completion speed becomes slow.
Inertial is small 5 times the rotor inertia max.
Inertial is medium 5 to 10 times the rotor inertia max.
Inertia is large 10 to 20 times the rotor inertia max.
Maximum command speed [pps]
Error counter accumulated pulse (P)
Position loop gain [1/s] =
Actual operation
Command operation pattern
Speed
[r/min]
Time t
Actual operation
Command operation pattern
Speed
[r/min]
Time t

 Loading...
Loading...





