A - 15
Appendices
OMNUC G5-series (Pulse-train Input Type) AC Servomotors and Servo Drives User’s Manual
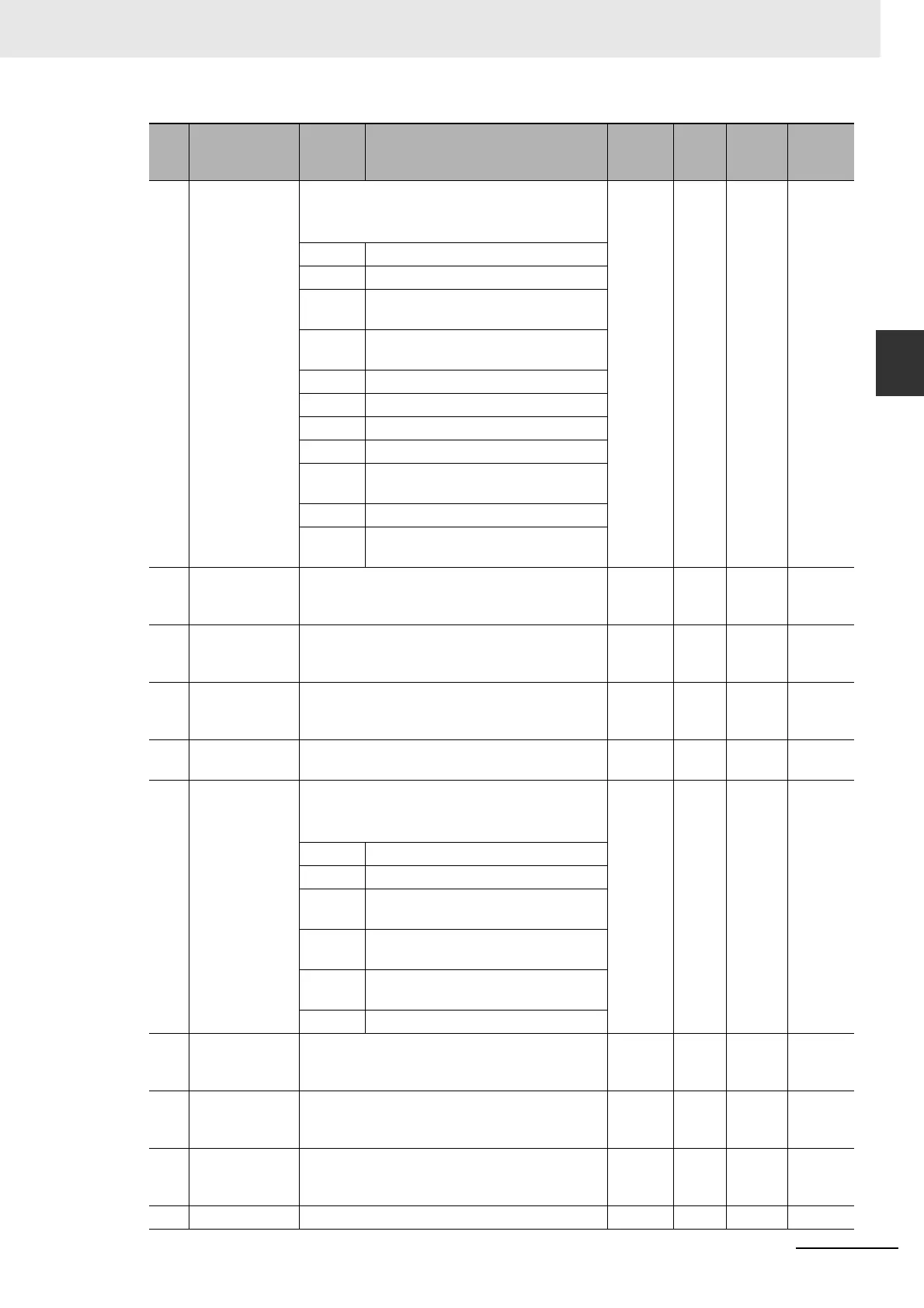
A-2 Parameter List
A
115 Switching
Mode in
Position Control
Select the conditions for switching the position
control gain.
Pn114 must be set to 1.
0 – 0 to 10 –
0 Always Gain 1
1 Always Gain 2
2 Switching using gain switching input
(GSEL)
3 Amount of change in torque
command
4 Always Gain 1
5 Command speed
6 Amount of position error
7 Command pulse input
8 Positioning completion output (INP)
OFF
9 Actual motor speed
10 Combination of command pulse input
and motor speed
116 Gain Switching
Delay Time in
Position Control
Set the delay time when switching from Gain 2
to Gain 1.
50 0.1
ms
0 to
10,000
–
117 Gain Switching
Level in
Position Control
Set the gain switching level. 50 – 0 to
20,000
–
118 Gain Switching
Hysteresis in
Position Control
Set the hysteresis in gain switching. 33 – 0 to
20,000
–
119 Position Gain
Switching Time
Set the position gain switching time in gain
switching.
33 0.1
ms
0 to
10,000
–
120 Switching
Mode in Speed
Control
Select the conditions for switching the speed
control gain.
Pn114 must be set to 1.
0 – 0 to 5 –
0 Always Gain 1
1 Always Gain 2
2 Switching using gain switching input
(GSEL)
3 Amount of change in torque
command
4 Amount of change in speed
command
5 Command speed
121 Gain Switching
Delay Time in
Speed Control
Set the delay time when switching from Gain 2
to Gain 1.
00.1
ms
0 to
10,000
–
122 Gain Switching
Level in Speed
Control
Set the gain switching level. 0 – 0 to
20,000
–
123 Gain Switching
Hysteresis in
Speed Control
Set the hysteresis in gain switching. 0 – 0 to
20,000
–
124 Reserved Do not set. 0 – 0 –
Pn
No.
Name Setting Description
Default
setting
Unit
Setting
range
Cycle the
power
supply

 Loading...
Loading...





