Appendices
A - 14
OMNUC G5-series (Pulse-train Input Type) AC Servomotors and Servo Drives User’s Manual
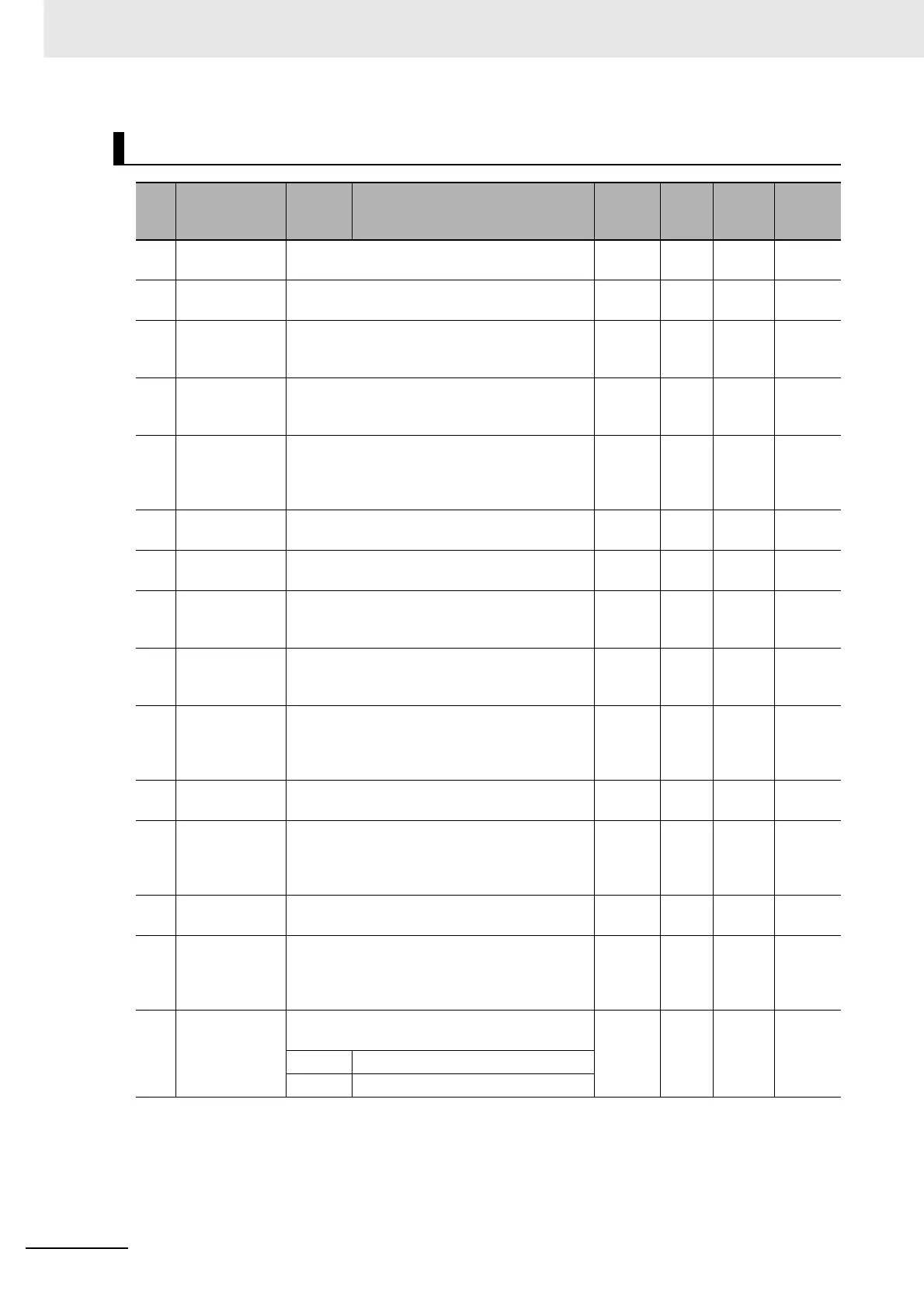
Gain Adjustment Parameters
Pn
No.
Name Setting Description
Default
setting
Unit
Setting
range
Cycle the
power
supply
100 Position Loop
Gain
Set the first position loop gain.
480
*1
0.1/s 0 to
30,000
–
101 Speed Loop
Gain
Set the first speed loop gain.
270
*2
0.1 Hz 1 to
32,767
–
102 Speed Loop
Integral Time
Constant
Set the first speed loop integral time constant.
210
*3
0.1
ms
1 to
10,000
–
103 Speed
Feedback Filter
Time Constant
Set the first speed feedback filter in six levels. 0 – 0 to 5 –
104 Torque
Command
Filter Time
Constant
Set the first torque filter time constant.
84
*4
0.01
ms
0 to
2,500
–
105 Position Loop
Gain 2
Set the second position loop gain.
570
*5
0.1/s 0 to
30,000
–
106 Speed Loop
Gain 2
Set the second speed loop gain.
270
*6
0.1 Hz 1 to
32,767
–
107 Speed Loop
Integral Time
Constant 2
Set the second speed loop integral time
constant.
10,000 0.1
ms
1 to
10,000
–
108
Speed
Feedback Filter
Time Constant 2
Set the second speed feedback filter in six
levels.
0 – 0 to 5 –
109 Torque
Command
Filter Time
Constant 2
Set the second torque filter time constant.
84
*7
0.01
ms
0 to
2,500
–
110 Speed Feed-
forward Amount
Set the speed feed-forward amount. 300 0.1% 0 to
1,000
–
111 Speed Feed-
forward
Command
Filter
Set the speed feed-forward filter time constant. 50 0.01
ms
0 to
6,400
–
112 Torque Feed-
forward Amount
Set the torque feed-forward amount. 0 0.1% 0 to
1,000
–
113 Torque Feed-
forward
Command
Filter
Set the torque feed-forward filter. 0 0.01
ms
0 to
6,400
–
114 Gain Switching
Input Operating
Mode Selection
Set this parameter if the gain switching function
is used for optimal tuning.
1 – 0 to 1 –
0 Gain 1 (PI/P switching is enabled)
1 Gain 1/Gain 2 switching is enabled

 Loading...
Loading...





